Elektroniczne przyrządy pomiarowe + Geodezja górnicza
Egzamin dyplomowy inżynierski
1
Firmowy klawisz “gwiazdka” umożliwiający szybką zmianę wielu parametrów pracy występuje
w tachimetrach:
1) Sokkia,
2) Topcon
3) Leica
4) Trimble
2
Pomiar pikiet tachimetrem elektronicznym wymaga m. in. następujących czynności:
1) wpisania nazwy roboty, numeru stanowiska i odczytu łaty wstecz
2) spoziomowania instrumentu, wycelowania na punkt nawiązania ,wytyczenia pikiet o znanych
współrzędnych
3) scentrowania instrumentu na stanowisku, wpisania nazwiska kierownika roboty, pomiaru odległości do
najbliższego punktu osnowy geodezyjnej
4) odpowiedniego ustawienia instrumentu na stanowisku, wprowadzenia współrzędnych stanowiska,
wprowadzenia poprawki atmosferycznej
3
Istotą metody impulsowej pomiaru odległości jest:
1) pomiar odległości i azymutu do punktu celu
2) pomiar czasu sygnału pomiarowego od momentu wyjścia z układu nadawczego do jego powrotu do
układu odbiorczego
3) pomiar czasu i przesunięcia fazowego fali sinusoidalnej
4) określenie odległości i kątów do punktu osnowy oraz wyznaczenie jego współrzędnych
4
Błąd pomiaru odległości mierzonej tachimetrem wyrażony wzorem m = ±( 2mm + 2ppm x D) wynosi dla
odcinka 1,5 km:
1) 3 mm
2) 4 mm
3) 5 mm
4) 6 mm
5
Tryb pracy „ tracking” dalmierza elektrooptycznego oznacza, że przyrząd wyposażony jest w:
1) system weryfikujący niepoziomość osi celowej
2) system umożliwiający pomiar kątów poziomych
3) system umożliwiający pomiar odległości do pryzmatu będącego w powolnym ruchu
4) system umożliwiający pomiar kątów pionowych
6
Jakie wyróżniamy elektroniczne systemy pomiaru kątów?
1) kodowe , impulsowe, łukowe
2) fazowe, liniowe, impulsowe
3) kodowe , dynamiczne, impulsowe
4) kodowe, tarczowe, bezpośrednie
7
W celu wprowadzenia poprawki atmosferycznej do pomiarów należy w tachimetrze elektronicznym wpisać
następujące wartości:
1) temperaturę powietrza i wartość ciśnienia atmosferycznego
2) ciśnienie atmosferyczne i współczynnik załamania fali elektromagnetycznej
3) temperaturę powietrza i prędkość rozchodzenia się fali elektromagnetycznej
4) wilgotność i temperaturę powietrza
8
Poprawka atmosferyczna w tachimetrach firmy Topcon jest równa zero dla następujących wartości
temperatury [0C] i ciśnienia atmosferycznego [hPa]:
1) +20; 1000
2) +12; 1020
3) +18; 1025,25
4) +15; 1013,25
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 7

Elektroniczne przyrządy pomiarowe + Geodezja górnicza
Egzamin dyplomowy inżynierski
9
Błąd odczytu niwelatorem na jednej łacie niwelacyjnej wynosi ±0,3mm. Jaki jest spodziewany średni
błąd określenia różnicy wysokości jeżeli ciąg niwelacyjny zawiera 8 stanowisk niwelatora?
1) 0,24mm
2) 1,20mm,
3) 2,40mm,
4) 4,80mm
10
Typowe zastosowania niwelatorów z wirującą wiązką laserową obejmują:
1) pomiar i obliczenie wysokości projektowanych budowli
2) wytworzenie poziomej płaszczyzny laserowej wykorzystywanej m.in.: do kontroli projektowanych
głębokości wykopów podczas ich wykonywania
3) śledzenia wiązką laserową poruszającego się pryzmatu i wyznaczenie jego współrzędnych
4) wykorzystanie wiązki laserowej do oświetlenia łat niwelacyjnych w warunkach słabej widoczności
11
Wyróżnia się następujący podział oprogramowania tachimetrów elektronicznych:
1) kodowe i strukturalne
2) systemowe i aplikacyjne,
3) zadaniowe i programujące,
4) pomiarowe i obliczeniowe
12
Bezpośrednio po pomiarze z zastosowaniem programu pomiar czołówek w tachimetrach firmy Topcon
wyświetlają się m.in.. Następujące zasadnicze wielkości:
1) wartość poprawki atmosferycznej
2) odległość pozioma i skośna pomiędzy punktami nacelowania
3) współrzędne stanowiska
4) poziom podświetlenia krzyża nitek
13
Metoda indukcyjna wykorzystania lokalizatorów elektromagnetycznych wymaga:
1) podłączenia nadajnika do wyznaczanego przewodu za pomocą odpowiedniego kabla i wyznaczenia
trasy przewodu odbiornikiem
2) uziemienia nadajnika
3) wykorzystania znaczników elektromagnetycznych
4) odpowiedniego ustawienia nadajnika nad szukanym przewodem i wyznaczenia położenia tego
przewodu odbiornikiem
14
Ogólny podział metod wykrywania przewodów podziemnych lokalizatorami elektromagnetycznymi jest
następujący:
1) elektromagnetyczne i liniowe
2) kierunkowe i powierzchniowe
3) lokalizujące i penetrujące
4) aktywne i pasywne
15
Istotna różnica pomiędzy metodą indukcyjną i galwaniczną dotyczy:
1) odmienności sposobu uziemienia
2) sposobu doprowadzenia prądu do wykrywanego przewodu
3) różnic w częstotliwości prądu z generatora
4) różnic w określaniu głębokości przewodów
16
Do dodatkowego wyposażenia umożliwiającego stosowanie lokalizatorów do wykrywania niemetalowych
rurociągów należą :
1) znaczniki elektromagnetyczne i folie plastikowe
2) sondy nadawcze i linki metalowe(trasery)
3) pręty metalowe do uziemienia nadajnika i kable łączące generator z anteną odbiorczą,
4) anteny kierunkowe i taśmy plastikowe
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 7
Elektroniczne przyrządy pomiarowe + Geodezja górnicza
Egzamin dyplomowy inżynierski
17
Typowa dokładność wykrywania trasy i głębokości przewodów lokalizatorami wynosi odpowiednio:
1) 10 cm i 20 cm
2) 5 cm i 10 cm
3) 20 cm i 30 cm
4) 30cm i 35 cm
18
Istota metody georadarowej polega na:
1) wytworzeniu wtórnego pola elektromagnetycznego wokół przewodu podziemnego
oraz ustaleniu kierunku rozchodzenia się tego pola
2) emisji przez antenę nadawczą impulsów elektromagnetycznych wysokiej częstotliwości
w głąb penetrowanego ośrodka oraz odpowiedniej rejestracji przez odbiornik fal odbitych
od granic warstw w tym ośrodku
3) ustaleniu parametrów geoelektrycznych podłoża z uwzględnieniem wilgotności gruntu
4) pomiarze długości profilu terenowego po którym przemieszcza się antena nadawcza
19
Stała dielektryczna wykorzystywana w pomiarach georadarem jest definiowana jako:
1) liczba niemianowana określająca właściwości geoelektryczne gruntu
2) stała odległość pomiędzy anteną nadawczą a odbiorczą georadaru
3) składnik wzoru do obliczania długości profilu po którym przemieszcza się antena
4) mianownik skali głębokości usytuowania obiektu zlokalizowanego georadarem
20
Radargram to:
1) zestaw linii tworzących osie przekroju i średnice penetrowanego obiektu
2) układ współrzędnych utworzony przez parametr czasu i odległości
3) zestaw algorytmów do obliczeń z pomiarów georadarem
4) radarowy obraz pionowego przekroju podpowierzchniowego powstałego
wzdłuż profilu (linii) przesuwania anteny
21
Dalmierz ultradźwiękowy nazywany jest także:
1) tachimetrem zwierciadlanym
2) echografem radialnym
3) echosondą
4) tachometrem
22
Głębokość przewodu wyznaczona metodą indukcyjną w pobliżu nadajnika (do ok. 20m) będzie:
1) mniejsza od faktycznej głębokości przewodu
2) większa od faktycznej głębokości przewodu
3) wyznaczona poprawnie w granicach typowej dokładności lokalizatora
4) nie można jej wyznaczyć
23
Ręczne dalmierze laserowe służą m.in. do:
1) pomiaru odległości poziomych i skośnych o długości ponad 300m
2) wykorzystania funkcji „pitagoras” do obliczenia kątów w dowolnych wielobokach zamkniętych
3) pomiaru pionowych odległości niedostępnych
4) obliczenia współrzędnych punktów celu
24
Do typowych elementów budowy tachimetru elektronicznego należą:
1) spodarka, pochyłomierz laserowy, luneta
2) spodarka, pionownik do pomiaru ekscentru stanowiska, luneta
3) dźwigary alidady, wyświetlacz wyników, czujnik określający wysokość instrumentu
4) luneta, wyświetlacz wyników, libelle
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 7
Elektroniczne przyrządy pomiarowe + Geodezja górnicza
Egzamin dyplomowy inżynierski
25
Dokładność pomiaru kąta tachimetrem typu GPT3007LN firmy Topcon, wynikająca z podanego oznaczenia
typu instrumentu wynosi:
1) 3cc,
2) 7cc,
3) 9cc,
4) 21cc
26
Obecnie obowiązujące szczegółowe przepisy dotyczące wykonywania
prac mierniczych zawarte są w:
1) Ustawie Prawo Górnicze i Geologiczne z dnia 9 czerwca 2011r.
2) Rozporządzeniu MSWiA z dnia 9 listopada 2011 r. w sprawie standardów technicznych wykonywania
geodezyjnych pomiarów sytuacyjnych i wysokościowych oraz opracowywania i przekazywania wyników tych
pomiarów do państwowego zasobu geodezyjnego i kartograficznego
3) Polskich Normach Mapy Górnicze
4) Rozporządzeniu Ministra Środowiska z dnia 22 grudnia 2011 r. w sprawie dokumentacji mierniczo-
geologicznej
27
Znaki geodezyjne w podziemnej szczegółowej osnowie sytuacyjnej stabilizowane są najczęściej w:
1) spągu
2) ociosach
3) stropie
4) obudowie drewnianej
28
Warunkiem koniecznym dla stosowania teodolitu w warunkach podziemnych jest:
1) dostosowanie do pracy w warunkach zagrożenia metanowego
2) duża jasność lunety
3) wyposażenie w sprzęg repetycyjny
4) mała waga
29
Wybrane czynności elementarne w pomiarze kąta poziomego to:
1) sprawdzenie warunku znaczka centrującego, centrowanie
2) centrowanie teodolitu i sygnałów, poziomowanie
3) pionowe ustawienie łat, poziomowanie
4) ustawienie lunety w poziomie, centrowanie
30
Azymuty w kopalniach podziemnych wyznacza się:
1) ze współrzędnych biegunowych
2) z pomiaru anemometrem
3) z pomiaru giroteodolitem
4) z rozwiązania trójkąta sferycznego
31
Bok bazowy wykorzystywany do wyznaczenia poprawki topograficznej ΔT wykorzystywanej do obliczenia
azymutu topograficznego powinien:
1) być jak najkrótszy
2) mieć współrzędne początkowego i końcowego punktu wyznaczone na podstawie pomiarów wykonanych
podczas tworzenia kopalni
3) mieć długość równą dokładnie 100metrów
4) powinien być jak najdłuższy i zapewniać jak najlepsze warunki pomiaru ( centrowanie, dobra wizura, brak
wstrząsów itp.)
32
W kątowym ciągu jednostronnie dowiązanym na błąd azymutu ostatniego boku mają wpływ:
1) błędy azymutu boku nawiązania, błędy pomiaru kątów poziomych w ciągu
2) tylko błędy długości boków w ciągu
3) błędy poziomowania teodolitu i sygnałów
4) tylko błąd pomiaru kąta na ostatnim bok
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 7
Elektroniczne przyrządy pomiarowe + Geodezja górnicza
Egzamin dyplomowy inżynierski
33
Orientacja sytuacyjna kopalni podziemnej może być wykonywana przez:
1) szyb pionowy
2) sztolnię
3) szyb pochyły
4) wszystkie odpowiedzi są poprawne
34
Orientacja wysokościowa kopalni podziemnej polega na
1) sytuowaniu wyrobisk na głębokościach o rzędnych równych pełnym dziesiątkom metrów
np. 320m ppm, 450m ppm
2) podawaniu wysokości najważniejszych chodników (odległości miedzy spągiem a stropem)
3) prowadzeniu chodników na tej samej wysokości
4) wyznaczeniu wysokości co najmniej dwóch znaków wysokościowych w sąsiedztwie szybu
oraz jednego w odległości 50 m od tych znaków
35
Największy wpływ na składową poprzeczną błędu położenia ostatniego punktu w typowym ciągu wiszącym
prostoliniowym ma:
a)błąd pomiaru długości boków w ciągu
b)błąd pomiaru różnic wysokości punktów w ciągu
c)błąd pomiaru katów poziomych w ciągu
d)błąd pomiaru katów pionowych w ciągu
36
Zadawanie kierunku wyrobiska w płaszczyźnie pionowej realizowane jest:
1) teodolitem lub niwelatorem
2) tylko teodolitem
3) tylko niwelatorem
4) żadna odpowiedź nie jest poprawna
37
W celu zadania kierunku wyrobiska w płaszczyźnie poziomej konieczna jest znajomość:
1) wysokości ostatniego, zastabilizowanego punktu w ciągu
2) azymutu osi projektowanego wyrobiska
3) spadku projektowanego wyrobiska
4) modelu teodolitu
38
Zgodnie z obowiązującymi przepisami uprawnienia mierniczego górniczego może uzyskać osoba, która:
1) wykazuje się znajomością zagadnień niezbędnych do wykonywania czynności mierniczego górniczego
2) posiada tytuł zawodowy magistra inżyniera w zakresie geodezji górniczej
3) odbyła 2-letnią praktykę mierniczą w ruchu zakładu górniczego
4) spełnia wszystkie wymienione warunki
39
W wyniku pomiaru giroteodolitem uzyskuje się azymut:
1) giroskopowy
2) topograficzny
3) astronomiczny
4) magnetyczny
40
Pionowanie, nawiązanie oraz wyznaczanie miejsca spoczynku pionu są elementami:
1) orientacji sytuacyjnej
2) centrowania i poziomowania instrumentu na stanowisku
3) orientacji wysokościowej
4) kalibracji pionownika laserowego
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 7
Elektroniczne przyrządy pomiarowe + Geodezja górnicza
Egzamin dyplomowy inżynierski
41
Zakładając, że tachimetr jest wyposażony w znaczek centrujący na lunecie centrowanie pod punktem może
być wykonane przy wykorzystaniu:
1) tylko pionownika laserowego
2) tylko pionownika optycznego
3) tylko pionu sznurkowego
4) pionownika laserowego lub pionownika optycznego lub pionu sznurkowego
42
Częstotliwość aktualizacji dokumentacji mierniczo-geologicznej zależna jest od:
1) typu górnictwa
2) wielkości wydobycia
3) ilości pracowników zatrudnionych w Dziale Mierniczo-Geologicznym
4) postępu robót górniczych
43
Osnowa sytuacyjna w kopalni dzieli się na osnowę:
1) poziomą i wysokościową
2) podstawową, szczegółową i pomiarową
3) stabilizowaną w spągu i stabilizowana w ociosach
4) podstawowa fundamentalną, bazową, pomiarową
44
Zgodnie z obowiązującymi przepisami kąty poziome w kopalnianej osnowie szczegółowej mierzone są
obowiązkowo:
1) metodą repetycyjną
2) dwukrotnie bez przecentrowania
3) dwukrotnie niezależnie z przecentrowaniem
4) metoda kierunkową
45
Poprawkę komparacyjną wprowadza się do pomiarów taśmą jeśli:
1) poprawka ta jest znana
2) długość nominalna taśmy jest inna niż długość rzeczywista
3) jest bardzo ciepło
4) wyrobisko jest nachylone
46
W wyrobiskach podziemnych stosuje się:
1) tylko niwelację geometryczną
2) tylko niwelacje trygonometryczną
3) pomiary GNSS
4) niwelację geometryczna lub trygonometryczna
47
Ciąg wliczeniowy to ciąg, w którym:
1) po wyrównaniu destabilizowano kolejne punkty
2) znane są współrzędne punktu początkowego i końcowego oraz azymut pierwszego boku
3) punkt pierwszy ma takie same współrzędne jak punkt ostatni
4) pomierzono giroazymuty na wszystkich bokach
48
Tolerancja zbicia to inaczej:
1) dopuszczalna wielkość wydobywanych brył węgla
2) głębokość wierconych otworów strzałowych
3) graniczny błąd zbicia
4) średni błąd zbicia
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 7

Elektroniczne przyrządy pomiarowe + Geodezja górnicza
Egzamin dyplomowy inżynierski
49
Wstępna analiza dokładności przebitki ma na celu:
1) wyznaczenie błędów pomiaru długości boków w osnowie po wyrrównaniu
2) wyznaczenie błędu punktu zbicia a posteriori
3) zaprojektowanie kształtu przekroju poprzecznego wyrobiska
4) określenie technologii pomiaru kątów i długości boków w celu osiągnięcia założonego błędu zbicia
50
Pomost kół linowych, zastrzały to elementy:
1) koparki wielkogabarytowej
2) wieży szybowej
3) szybu
4) wiertni
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 7 z 7
Geodezja 1
Egzamin dyplomowy inżynierski
Metodę kierunkową pomiaru kątów powinno stosować się:
1) dla każdej liczby celowych
2) na terenach bagiennych i tam gdzie pomiar może trwać długo
3) dla trzech lub większej liczby celowych
4) gdy chcemy zmniejszyć błąd odczytu
1
Dla poziomej osi celowej wpływ błędu kolimacji na błąd odczytu kierunku jest:
1) zerowy
2) minimalny
3) zależny od wskazania libeli głównej
4) związany z błędem inklinacji
2
Układ współrzędnych "2000" obejmuje:
1) jedną strefę odwzorowania
2) dwie strefy odwzorowania
3) cztery strefy odwzorowania
4) odwzorowanie półkuli północnej
3
Prawidłową postacią godła mapy w skali 1:500 w układzie "2000" jest:
1) 5.119.1807.32
2) 5.119.180.7.3.2
3) 5.119.18.07.32
4) 5.119.18.07.3.2
4
Szkic przeglądowy szkiców polowych jest:
1) wykonywany po zakończeniu roboty
2) zbędny
3) wykonywany w miarę postępu robót
4) wykonywany tylko dla pomiarów wysokościowych
5
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 10
Geodezja 1
Egzamin dyplomowy inżynierski
Błąd kolimacji w teodolicie:
1) można usunąć przez przesunięcie siatki celowniczej w kierunku poziomym
2) nie daje się rektyfikować
3) można usunąć przez przesunięcie siatki celowniczej w kierunku pionowym
4) można usunąć przez rektyfikację libeli głównej
6
Dopuszczalna długość rzędnej dla szczegółów I grupy dokładnościowej
1) nie jest ograniczona
2) zależy od skali opracowania
3) wynosi 25 m
4) wynosi 50 m
7
Dopuszczalny średni błąd położenia punktów w sytuacyjnej osnowy pomiarowej:
1) ma być nie większy od 0.20 m
2) ma być nie większy od 0.10 m
3) ma być nie większy od 0.05 m
4) zależy od rzędu osnowy
8
Zasady wykonywania pomiarów sytuacyjno-wysokościowych reguluje:
1) instrukcja K-1
2) standardy w rozporządzeniu Ministra Spraw Wewnętrznych i Administracji
3) wytyczne techniczne
4) tylko instrukcja G-4
9
Pomiar czołówek w metodzie biegunowej zdejmowania szczegółów:
1) jest zbędny
2) stanowi tylko uzupełnienie pomiaru w miejscach niedostępnych
3) ma znaczenie tylko kontrolne
4) stanowi uzupełnienie i jednocześnie kontrolę pomiaru
10
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 10
Geodezja 1
Egzamin dyplomowy inżynierski
Odchyłka kątowa w ciągu poligonowym, nie większa od dopuszczalnej, jest spowodowana:
1) błędem grubym pomiaru kątów
2) błędami osobowymi przy pomiarze
3) błędami przypadkowymi pomiaru
4) błędami położenia punktów nawiązania
11
W pomiarowej osnowie sytuacyjnej pomiary kątów i odległości należy wykonać ze średnimi błędami:
1) m
α
? 0,0010
g
;m
d
? 0,01m
2) m
α
? 0,0020
g
;m
d
? 0,02m + 0,01m/km
3) m
α
? 0,0030
g
;m
d
? 0,01m + 0,01m/km
4) m
α
? 0,0040
g
;m
d
? 0,02m + 0,02m/km
12
Przez pomiar kąta poziomego w dwóch położeniach lunety eliminują się błędy:
1) libeli
2) indeksu
3) runu
4) kolimacji i inklinacji oraz mimośrodu limbusa względem alidady
13
Układy współrzędnych "1992" i „2000” powstają w wyniku:
1) odwzorowania wiernoodległościowego
2) odwzorowania wiernopolowego
3) poprzecznego, walcowego odwzorowania siecznego Gaussa - Krugera
4) poprzecznego, walcowego odwzorowania Gaussa – Krugiera
14
Poprawka mierzonej długości ze względu na pochylenie terenu jest:
1) ujemna
2) stała
3) zależna od siły naciągu przymiaru
4) dodatnia
15
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 10
Geodezja 1
Egzamin dyplomowy inżynierski
Wagi ciągów w sieciach niwelacyjnych wyrównywanych metodą przybliżoną są:
1) odwrotnie proporcjonalne do liczby stanowisk w ciągu
2) wprost proporcjonalne do liczby stanowisk
3)
odwrotnie proporcjonalne do liczby stanowisk lub długości ciągów
4)
wprost proporcjonalne do długości ciągów
16
Niwelacja metodą przekrojów powinna być stosowana:
1) zawsze gdy trzeba wykonać mapę sytuacyjno-wysokościową
2) tylko w terenie płaskim
3) dla obiektów wydłużonych
4) do wyznaczenia rzeźby terenu na obszarach zabudowanych
17
Interpolację warstwic wykonywać należy:
1) we wszystkich kierunkach w stosunku do pikiet sąsiednich
2) tylko wzdłuż linii ściekowych lub grzbietowych
3) w kierunku spadku terenu
4) wzdłuż linii najmniejszego spadu
18
Błąd zera łat znosi się przez zastosowanie:
1) nieparzystej liczby stanowisk niwelatora w ciągu
2) równej długości celowych
3) żabek niwelacyjnych
4) parzystej liczby stanowisk niwelatora w ciągu
19
Powierzchnię kompleksu wielobocznego, którego punkty załamania pomierzono metodą biegunową
z kilku stanowisk liczymy:
1) ze współrzędnych biegunowych
2) wzorami Gaussa
3) wzorami Herona
4) wzorami Gaussa po przeliczeniu współrzędnych biegunowych na współrzędne ortogonalne
20
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 10
Geodezja 1
Egzamin dyplomowy inżynierski
Na terenach zabudowanych pionowe ukształtowanie terenu przedstawia się na mapach najczęściej:
1) za pomocą warstwic
2) za pomocą wysokości pikiet
3) za pomocą wysokości pikiet i znaków umownych
4) tylko za pomocą znaków umownych
21
Orientacja kreski zerowej limbusa przez wycelowanie na drugi punkt osnowy,
na stanowisku pomiaru biegunowego, ma na celu:
1) eliminację błędu libeli teodolitu
2) eliminację refrakcji bocznej
3) kontrolę i podniesienie dokładności nawiązania kątowego instrumentu na stanowisku
4) wyznaczenie współrzędnych punktów nawiązania
22
Który wariant podanych szczegółów sytuacyjnych zaliczany jest do II grupy dokładnościowej:
1) mosty, wiadukty, kanały, parki
2) kanały, elementy podziemne uzbrojenia terenu, drzewa przyuliczne, tamy
3) boiska sportowe, groble, naturalne linie brzegowe wód płynących i stojących, pomniki
4) krawężniki, latarnie, tunele, ogrodzenia trwałe
23
Który wzór na obliczenie teoretycznej sumy kątów prawych w ciągu poligonowym nawiązanym dwustronnie,
(Ap- azymut początkowy, Ak- azymut końcowy, n - liczba pomierzonych kątów) jest poprawny:
1) 180o(n-2),
2) Ak - Ap + n 180o,
3) 180o (n+2),
4) Ap - Ak + n 180o
24
Przy obliczaniu i wyrównywaniu pola powierzchni działek i użytków gruntowych na mapie kolejność
obliczeń poszczególnych elementów jest następująca:
1) obręb, kompleks, użytek gruntowy,
2) użytek gruntowy, działka
3) obręb, kompleks, działka, kontury klasyfikacyjne w użytkach gruntowych
4) obręb, użytek gruntowy, działka
25
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 10
Geodezja 1
Egzamin dyplomowy inżynierski
Podstawą podziału na sekcje mapy zasadniczej jest mapa topograficzna w skali:
1) 1:100000
2) 1:50000
3) 1:25000
4) 1:10000
26
Oś celowa lunety to:
1) prosta łącząca środek optyczny obiektywu i środek optyczny okularu
2) prosta łącząca środek optyczny obiektywu i środek siatki celowniczej
3) prosta łącząca środek optyczny okularu i środek siatki celowniczej
4) prosta prostopadła do osi obrotu instrumentu
27
Pomiar kąta w jednej serii oznacza:
1) pomiar tego kąta w dwóch położeniach lunety
2) pomiar tego kąta w jednym położeniu lunety
3) pomiar tego kąta w jednym położeniu lunety, ale przy dwóch niezależnych nacelowaniach
4) pomiar kąta na dwu różnych miejscach limbusa
28
Nieprostopadłość osi obrotu lunety do pionowej osi obrotu instrumentu to:
1) błąd kolimacji
2) błąd libel
3) błąd inklinacji
4) błąd indeksu
29
Jeśli błąd względny pomiaru długości nie może przekraczać 1/2000 to błąd bezwzględny pomiaru odległości
100 m nie może być większy od:
1) 8 cm
2) 0.10 m
3) 5 cm
4) 20 cm
30
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 10
Geodezja 1
Egzamin dyplomowy inżynierski
Wielkości poprawek kątowych w ciągu poligonowym wyrównywanym sposobem przybliżonym:
1) zależą od wielkości kąta
2) zależą od długości ramion tego kąta
3) zależą od wielkości kąta i długości ramion
4) nie zależą od wielkości kąta i długości ramion
31
Pozioma osnowa pomiarowej jest osnową::
1) jednorzędową
2) co najwyżej trzyrzędową
3) wielorzędową
4) co najwyżej dwurzędową
32
Przy pomiarze kierunku poziomego, przy celowaniu na wierzchołek 2-metrowej tyczki oddalonej od
stanowiska o 100 m i odchylonej w płaszczyźnie kolimacyjnej o 10o od pionu popełniamy błąd w wyznaczeniu
kierunku z tytułu wychylenia tyczki:
1) równy 5'
2) zależny od wielkości wychylenia tyczki
3) zależny od odległości pomiędzy stanowiskiem a celem
4) równy 0o00'00".
33
Długości ciągów sytuacyjnych w osnowie pomiarowej mogą wynosić:
1) do 5km
2) powyżej 2km
3) do 2 km, a w terenach rolnych i leśnych do 4km
4) najwyżej do 3km
34
Czy w sytuacyjnej osnowie pomiarowe mogą być stosowane ciągi wiszace:
1) tak, jeżeli ciąg ma nie więcej niż 3 boki
2) tak, jeżeli ciąg ma co najwyżej 2 boki
3) nie
4) tak, gdy długość ciągu nie przekracza 1,5 km
35
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 7 z 10
Geodezja 1
Egzamin dyplomowy inżynierski
Średni błąd pomiaru różnic wysokości metodą niwelacji geometrycznej, w wysokościowej osnowie pomiar
może być większy od:
1) 0,05m
2) 0,02mi
3) 50 mm/km
4) 20 mm/km
36
Pole działki z pomiaru graficznego na mapie w skali 1:2000 wynosi 100cm2 ,
a na mapie w skali 1:500 pole tej samej działki wynosi:
1) 400 cm2
2) 0.16 m2
3) 25 cm2
4) 160 cm2
37
Dane jest godło mapy 6.110.25. Liczba 25 oznacza:
1) numer rzędu
2) numer strefy odwzorowawczej
3) numer kolumny
4) numer arkusza mapy
38
Wymiary ramek sekcyjnych mapy zasadniczej:
1) zależą od skali mapy
2) zależą od treści mapy
3) zależą od wielkości obszaru przedstawionego na mapie
4) są stałe
39
Suma odczytów kręgu pionowego z I i II położenia lunety wynosi 400g.08. Obliczony błąd indeksu ma
wartość:
1) 4c
2) + 8c
3) - 8c
4) + 4c
40
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 8 z 10
Geodezja 1
Egzamin dyplomowy inżynierski
Metoda niwelacji ze środka eliminuje między innymi błąd:
1) nierównoległości osi celowej lunety do osi libeli niwelacyjnej lub nieprawidłowej kompensacji
pochylenia lunety
2) niepionowości osi obrotu niwelatora
3) libeli alidadowej
4) niepionowego ustawienia łat
41
Błąd pomiaru kierunku w jednym położeniu lunety wynosi mk = 10cc. Ile będzie wynosił błąd pomiaru kąta
pomierzonego w jednej serii:
1) 5cc
2) 10cc
3) 20cc
4) 15cc
42
Mapę zasadniczą sporządza się w skalach:
1) 1:5000 1:2000 1:1000 1:500
2) 1:2000 1:1000 1:500 1:250
3) 1:10000 1:5000 1:2000 1:1000
4) 1:25000 1:10000 1:5000 1:2000
43
Na błąd odczytu z łaty odchylonej od pionu mają wpływ:
1) tylko kąt wychylenia łaty od pionu
2) kąt wychylenia łaty od pionu w płaszczyźnie pionowej celowania i wartość odczytu na łacie
3)
wyłącznie wartość odczytu na łacie
4)
wartość odczytu na łacie lub kąt wychylenia łaty od pionu
44
W niwelatorze automatycznym usuwanie błędu nieprawidłowej kompensacji polega na:
1) nastawieniu poziomej kreski siatki celowniczej na prawidłowy odczyt na łacie za pomocą leniwki
alidadowej
2) nastawieniu poziomej kreski siatki celowniczej na prawidłowy odczyt za pomocą śruby elewacyjnej
3) nastawieniu poziomej kreski siatki celowniczej na prawidłowy odczyt za pomocą śrub ustawczych
i ruchu leniwego
4) nastawieniu poziomej kreski siatki celowniczej na prawidłowy odczyt za pomocą śrubek
rektyfikacyjnych krzyżyka kresek
45
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 9 z 10
Geodezja 1
Egzamin dyplomowy inżynierski
Pomiary w wysokościowej osnowie pomiarowej wykonuje się technologią:
1) niwelacji technicznej lub niwelacji precyzyjnej
2) niwelacji precyzyjnej
3) niwelacji geometrycznej-technicznej, trygonometrycznej, satelitarnej.
4) niwelacji technicznej o podwyższonej dokładności
46
Odchyłkę otrzymaną z pomiaru "tam" i "z powrotem" ciągu niwelacyjnego można w każdym przypadku
rozrzucić:
1) proporcjonalnie do liczby stanowisk lub wyjątkowo proporcjonalnie do długości odcinków
niwelacyjnych
2) proporcjonalnie do długości odcinków niwelacyjnych
3) proporcjonalnie do liczby mierzonych punktów
4) proporcjonalnie do różnicy wysokości
47
Przy wyznaczaniu punktów osnowy pomiarowej metodą wcięć:
1) należy pomierzyć co najmniej 2 elementy nadliczbowe
2) nie ma potrzeby pomiaru elementów nadliczbowych
3) należy pomierzyć co najmniej 3 elementy nadliczbowe
4) należy pomierzyć co najmniej 1 element nadliczbowy
48
Jeżeli przyrost DXAB ma znak dodatni, a przyrost DYAB ma znak ujemny to azymut boku AB (AAB)
zawiera się w granicach:
1) 100g - 200g
2) 300g - 400g
3) 180o - 270o
4) 0g - 100g
49
Szczegóły terenowe wraz z elementami kontrolnymi:
1) mierzymy według uznania osoby wykonującej pomiar
2) mierzymy w zależności od celu pomiaru
3) nie mierzymy w przypadku metody biegunowej zdjęcia szczegółów
4) mierzymy w przypadku pomiaru szczegółów grupy I
50
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 10 z 10
Geodezja 2
Egzamin dyplomowy inżynierski
Wyrównanie stacyjne to:
1) obliczenie poprawek do kątów,
2) wyznaczenie współrzędnych pęku kierunków,
3) wyznaczenie wartości najprawdopodobniejszych kierunków wraz z oceną dokładności pomiarów,
4) wyrównanie obserwacji w module.
1
Zasadnicza zaleta metody wypełnienia horyzontu w pomiarach kątowych to:
1) szybki pomiar kątów w zakresie pełnego horyzontu,
2) dowolny wybór kata do pomiaru,
3) pomiar kolejnych kątów w obrębie pełnego horyzontu,
4) wyrównanie stacyjne.
2
Przy przeniesieniu współrzędnych niezbędne pomiary w siatce przeniesienia wykonuje się na punktach:
1) macierzystych (właściwych),
2) kierunkowych,
3) bazowych siatki,
4) macierzystych i bazowych.
3
Dla redukcji długości przestrzennej na powierzchnię odniesienia należy wyznaczyć:
1) różnicę wysokości końców tego odcinka,
2) wysokość punktu początkowego i końcowego oraz promień kuli R,
3) wysokość punktu początkowego odcinka, kąt zenitalny odcinka oraz promień krzywizny R powierzchni
odniesienia,
4) wysokość ustawienia dalmierza i reflektora nad punktami oraz promień kuli R.
4
Teorię par spostrzeżeń stosujemy do oceny dokładności pomiarów gdy obserwacje wykonano:
1) dwoma technologiami,
2) dwukrotnie,
3) wielokrotnie,
4) dwoma instrumentami.
5
Dokładność pomiaru kątów zależy:
1) tylko od klasy teodolitu i warunków atmosferycznych,
2) tylko od technologii pomiaru,
3) od klasy teodolitu i technologii pomiaru, obserwatora i warunków atmosferycznych,
4) od różnicy wysokości stanowiska i celu oraz długości celowych.
6
Redukcja długości na powierzchnię, odcinków pochyłych pomierzonych dalmierzami
elektromagnetycznymi, na powierzchnię odniesienia jest redukcją :
1) na płaszczyznę,
2) na powierzchnię poziomą,
3) na geoidę,
4) na powierzchnię sferyczną o średnim promieniu Ziemi na obszarze pomiaru.
7
Błąd pomiaru odległości dalmierzami elektromagnetycznymi:
1) zależy tylko od długości mierzonego odcinka i błędu stałej dalmierza,
2) zależy tylko od dokładności centrowania instrumentów pomiarowych,
3) zależy od długości mierzonego odcinka i dokładności centrowania instrumentów pomiarowych, błędów
wyznaczenia stałych dalmierza,
4) jest niezależny od długości odcinka i parametrów meteorologicznych.
8
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 7
Geodezja 2
Egzamin dyplomowy inżynierski
Stała dodawania w dalmierzach elektronicznych odnosi się tylko do:
1) dalmierza,
2) reflektora,
3) zestawu dalmierz + reflektor,
4) 4)wybranych typów dalmierza.
9
Punkty geodezyjnych osnów szczegółowych na obszarach zabudowanych (miasta) najkorzystniej jest
wyznaczać:
1) metodą poligonową z wykorzystaniem tachimetrów elektronicznych,
2) metodą satelitarną,
3) metoda triangulacyjną,
4) metodą biegunową.
10
Dla redukcji długości zmierzonych ze stanowisk mimośrodowych wystarczy wyznaczyć:
1) różnicę wysokości centrów i mimośrodów,
2) promień krzywizny Ziemi,
3) element liniowy mimośrodu,
4) element liniowy i kąt dyrekcyjny.
11
Siatkę przeniesienia współrzędnych zakłada się dla wyznaczenia:
1) elementów mimośrodu,
2) współrzędnych punktu przeniesienia,
3) współrzędnych punktu kierunkowego,
4) współrzędnych punktu bliskiego.
12
Warunki (czynniki) zewnętrzne obarczają mierzone kąty błędem:
1) grubym,
2) średnim,
3) systematycznym,
4) przypadkowym .
13
Dla jednoznacznego określenia współrzędnych punktu wyznaczonego metodą wcięcia wstecz należy
pomierzyć:
1) 2 kąty poziome na punktach o znanych współrzędnych,
2) 2 kąty poziome na punkcie wyznaczanym,
3) po jednym kącie poziomym i pionowym na punkcie wyznaczanym,
4) po jednym kącie na punkcie o znanych współrzędnych i punkcie wyznaczanym.
14
Czy pomierzone kąty poziome w osnowach szczegółowych wymagają redukcji na powierzchnię
odniesienia :
1) tylko w szczególnych przypadkach,
2) tak,
3) tak, gdy kąty są rozwarte,
4) tak, dla zróżnicowanych długości celowych.
15
Gdy stosujemy odwzorowanie wiernokątne to:
1) nie wyznaczamy poprawki odwzorowawczej kątów,
2) wyznaczamy poprawkę tylko dla długości odcinków,
3) wprowadzamy poprawkę odwzorowawczą do obliczonych współrzędnych,
4) wprowadzamy poprawkę odwzorowawczą: kątów, azymutów, długości odcinków, pola powierzchni.
16
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 7
Geodezja 2
Egzamin dyplomowy inżynierski
Dla jednoznacznego określenia współrzędnych punktu wyznaczanego wcięciem wstecz niezbędne są
wizury na:
1) trzy punkty o znanych współrzędnych,
2) dwa punkty o znanych współrzędnych,
3) punkty węzłowe,
4) trzy punkty kierunkowe.
17
Szkic założeń projektu technicznego szczegółowej osnowy poziomej 3 klasy, w formie sieci poligonowej,
zawiera między innymi:
1) projektowane punkty osnowy ,
2) przebieg projektowanych ciągów i punkty wcinane,
3) projektowane obserwacje,
4) projektowane punkty i ich numery.
18
Projekt techniczny szczegółowej osnowy poziomej 3 klasy, w formie sieci poligonowej zawiera między
innymi:
1) długości ciągów,
2) numery ciągów i ich długość,
3) projektowane punkty osnowy i ich numery, numery ciągów,
4) typy stabilizowanych znaków.
19
Punkt o numerze 10051, wpisany na szkicu osnowy jest punktem:
1) poziomej osnowy podstawowej,
2) ekscentrycznym poziomej osnowy szczegółowej,
3) wysokościowej osnowy szczegółowej ,
4) wysokościowej osnowy podstawowej.
20
Wznowienie punktów osnowy polega na:
1) stabilizacji zniszczonego punktu na podstawie znaku podziemnego,
2) stabilizacji zniszczonego punktu na podstawie miar od poboczników,
3) odtworzeniu punktu,
4) stabilizacji nowego punktu i wykonanie nowych pomiarów do punktów sąsiednich.
21
Ocenę dokładności wyników pomiarów przed ich wyrównaniem przeprowadza się dla:
1) oceny poprawności wykonanych pomiarów,
2) ustalenia wag i porównania uzyskanej dokładności z wymaganiami standardów,
3) wyznaczenia najprawdopodobniejszych wartości wyników pomiaru,
4) wyznaczenia poprawek.
22
Dla dokonania transformacji współrzędnych niezbędna jest znajomość:
1) współrzędnych punktów dostosowania,
2) punktów kierunkowych,
3) odwzorowania kartograficznego,
4) skali mapy.
23
Minimalna liczba punktów dostosowania przy transformacji na płaszczyźnie wynosi:
1) jeden,
2) dwa,
3) trzy,
4) cztery.
24
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 7
Geodezja 2
Egzamin dyplomowy inżynierski
Punkt poziomej osnowy szczegółowej może być wyznaczony stosując:
1) wcięcie w przód z dwóch punktów o znanych współrzędnych,
2) wcięcie wstecz do trzech punktów o znanych współrzędnych,
3) wcięcie kątowo - liniowe : pomierzony kąt na wyznaczanym punkcie i długość jednego odcinka ,
4) dowolnym wcięciem o trzech elementach mierzonych.
25
Na podstawie graficznej analizy dokładności wyznaczenia pojedynczych punktów możemy określić:
1) elementy elips błędów,
2) średnie błędy elementów mierzonych,
3) maksymalny błąd położenia punktu i kierunek tego błędu,
4) średnie błędy punktów nawiązania.
26
Dla wyznaczenia różnicy wysokości punktów metoda niwelacji trygonometrycznej należy wyznaczyć:
1) tylko kąt pionowy, poziomy i odległość,
2) tylko kąt pionowy, współczynnik refrakcji i promień Ziemi,
3) tylko wysokość ustawienia przyrządów i przyrosty współrzędnych,
4) kąt pionowy, odległość, wysokość ustawienia przyrządów pomiarowych i wprowadzić poprawki
uwzględniające współczynnik refrakcji i promień krzywizny Ziemi .
27
Poprawkę ze względu na krzywiznę powierzchni odniesienia w niwelacji trygonometrycznej należy
wprowadzać:
1) zawsze,
2) od ustalonej minimalnej długości celowej,
3) w zależności od kąta zenitalnego,
4) nigdy.
28
Poprawkę do różnicy wysokości ze względu na krzywiznę powierzchni odniesienia w niwelacji
trygonometrycznej:
1) należy wprowadzać ze znakiem "-",
2) należy wprowadzać ze znakiem "+",
3) należy wprowadzać przy krótkich celowych,
4) nie należy wprowadzać nigdy.
29
Dokładna znajomość współczynnika refrakcji w niwelacji trygonometrycznej jest istotna w przypadku:
1) wyłącznie krótkich celowych,
2) wyłącznie małych różnic wysokości,
3) tylko dużych kątów pochylenia,
4) dużych kątów pochylenia i długich celowych.
30
Odchylenie łaty, sygnału od linii pionu obarcza błędem:
1) tylko wyznaczoną różnicę wysokości,
2) tylko wyznaczoną odległość,
3) wyznaczoną różnicę wysokości i wyznaczoną odległość,
4) nie obarcza błędem żadnej z nich.
31
Jednoznaczne określenie współrzędnych przestrzennych punktu wymaga znajomości:
1) trzech katów poziomych,
2) dwóch katów pionowych i jednego poziomego,
3) trzech długości celowych,
4) dwóch długości celowych.
32
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 7
Geodezja 2
Egzamin dyplomowy inżynierski
Punkty szczegółowej osnowy poziomej, zgodnie ze standardami mogą być wyznaczane technologią
satelitarną GPS:
1) stosując tryb pomiaru RTK GPS,
2) w trybie statycznym pomiarów,
3) gdy istnieją wizury pomiędzy punktami,
4) na podstawie trzech wektorów niezależnych z trzech sesji.
33
Dokładność różnicy wysokości wyznaczanej metodą niwelacji trygonometrycznej przy krótkich celowych
zależy od:
1) dokładności wyznaczenia współczynnika refrakcji,
2) błędów pomiaru kąta pionowego i odległości,
3) błędu wyznaczenia promienia krzywizny Ziemi,
4) warunków terenowych.
34
Osnowy dwufunkcyjne:
1) tworzą sieć punktów o współrzędnych x, y, H,
2) wyznaczane są dwoma technologiami pomiarowymi,
3) tworzą punkty osnowy sytuacyjnej, wysokościowej i grawimetrycznej,
4) tworzą wyodrębniony jednolity system klasyfikacji dokładnościowej.
35
Tachimetria elektroniczna może być stosowana przy opracowywaniu mapy:
1) tylko zasadniczej sytuacyjnej,
2) wysokościowej,
3) zasadniczej sytuacyjno-wysokościowej,
4) żadnej.
36
Szczegóły sytuacyjne przy graficznym opracowywaniu wyników pomiarów tachimetrycznych
wykonywanych tachimetrem elektronicznym nanosi się na podstawie:
1) współrzędnych biegunowych,
2) współrzędnych prostokątnych,
3) długości,
4) kątów poziomych.
37
Transformacja Helmerta jest transformacją:
1) afiniczną,
2) wiernokątną,
3) sześcioparametrową,
4) niekonforemną.
38
Oznaczenie 7.126.24.10 jest godłem mapy w układzie:
1) „1992”, w skali 1 : 5000,
2) „1942”, w skali 1 : 2000,
3) „2000”, w skali 1 : 2000,
4) „1965”, w skali 1 : 5000.
39
Niwelacja trygonometryczna w terenach górskich wykonana ze środka mierzonego odcinka wymaga
wprowadzenia poprawek ze względu na :
1) krzywiznę Ziemi i refrakcję,
2) refrakcję i odchylenie pionu od normalnej do elipsoidy,
3) jak w p. 2) i poprawkę miejsca zera,
4) jak w p. 2) i poprawkę odchylenia osi głównej instrumentu od kierunku pionu.
40
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 7
Geodezja 2
Egzamin dyplomowy inżynierski
Obecnie mapy dla celów gospodarczych opracowuje się w odwzorowaniu:
1) Gaussa - Krügera,
2) azymutalnym,
3) stożkowym,,
4) żadnym z wymienionych.
41
Przy kącie dyrekcyjnym równym 200g największy wpływ na dokładność wyznaczanej poprawki redukcyjnej
do kierunków mierzonych mimośrodowo ma:
1) błąd pomiaru kąta dyrekcyjnego,
2) błąd pomiaru elementu liniowego mimośrodu,
3) błąd wyznaczenia długości celowej,
4) żaden z wymienionych błędów.
42
Przy kącie dyrekcyjnym równym 200g największy wpływ na dokładność wyznaczanej poprawki redukcyjnej
do długości mierzonej mimośrodowo ma:
1) błąd pomiaru kąta dyrekcyjnego,
2) błąd pomiaru elementu liniowego mimośrodu,
3) błąd pomiaru długości,
4) żaden z wymienionych błędów.
43
Zestaw liczb 6.104.19.4 może być dla obszaru Polski godłem arkusza mapy:
1) w skali 1 : 25 000,
2) w skali 1 : 10 000,
3) w żadnej z podanych w p. 1) i p. 2) skal,
4) w skali 1 : 50000.
44
W przypadku niedostępnego punktu mimośrodowego elementy mimośrodu mogą być:
1) pomierzone bezpośrednio,
2) określone graficznie,
3) wyznaczone pośrednio,
4) pominięte.
45
Ścisłe wyrównanie sieci niwelacji trygonometrycznej polega na rozwiązaniu układu równań poprawek :
1) kątów pionowych i różnic wysokości,,
2) długości celowych i różnic wysokości,
3) różnic wysokości,
4) kątów pionowych i azymutów.
46
Szczegółową wysokościową osnowę geodezyjną mierzy się :
1) tylko metodą niwelacji geometrycznej,
2) tylko metodą niwelacji satelitarnej,
3) metodą niwelacji satelitarnej i geometrycznej,
4) metodą niwelacji trygonometrycznej.
47
Dopuszczalna różnica dwukrotnego wyznaczenia przewyższenia na stanowisku niwelacji geometrycznej
nie powinna przekraczać:
1) 1 mm,
2) 2 mm,
3) 5 mm,
4) 10 mm.
48
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 7

Geodezja 2
Egzamin dyplomowy inżynierski
Wstępne analizy dokładnościowe mają na celu:
1) tylko ustalenie wymaganej dokładności pomiarów w sieci,
2) tylko ustalenie optymalnej konstrukcji sieci,
3) ustalenie wymaganej dokładności pomiarów w sieci i ustalenie optymalnej konstrukcji sieci.
4) wyłącznie odrzucenie obserwacji odskakujących.
49
Kompensatory w instrumentach geodezyjnych służą do:
1) wyznaczania błędu indeksu,
2) eliminacji grubych błędów,
3) wyznaczenia i stabilizacji kierunku pionu lub poziomu,
4) pomiaru odległości.
50
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 7 z 7
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Dokładności centymetrowe wyznaczenia pozycji względnej za pomocą GPS są uzyskiwane w trybie
pracy:
1) autonomicznym
2) nawigacyjnym
3) różnicowym kodowym
4) różnicowym fazowym
1
Korekcje nadawane przez satelity geostacjonarne systemu EGNOS są wykorzystywane w trybie pracy:
1) różnicowym kodowym
2) różnicowym fazowym
3) autonomicznym
4) nawigacyjnym
2
Najwyższe dokładności wyznaczenia pozycji, jakie zapewnia system ASG-EUPOS-PL, są osiągane
w trybie pracy:
1) nawigacyjnym
2) różnicowym kodowym
3) różnicowym fazowym
4) autonomicznym
3
Minimalna ilość satelitów pozwalająca na jednoznaczne wyznaczenie pozycji w dowolnym trybie pracy
systemu GNSS to:
1) 6
2) 4
3) 2
4) 1
4
Zegar odbiornika sygnałów GNSS jest synchronizowany z czasem systemu przez:
1) łącze internetowe
2) łącze radiowe za pośrednictwem lokalnych stacji UKF
3) wyznaczenie dodatkowej niewiadomej w równaniu pseudoodległości
4) wyznaczenie dodatkowej niewiadomej z obserwacji dopplerowskich
5
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Klotoida to krzywa przejściowa, której :
1) długość jest wprost proporcjonalna do promienia
2) długość jest odwrotnie proporcjonalna do krzywizny
3) iloczyn długości klotoidy i stycznej krótkiej jest stały
4) iloczyn długości i promienia jest wielkością stałą
6
Podstawowe kryterium oceny dokładności osnowy realizacyjnej to:
1) średni błąd najbardziej niekorzystnie położonego punktu
2) średni błąd długości najbardziej niekorzystnie położonego boku sieci
3) największy średni błąd kąta
4) największy średni błąd punktu określonego elipsą błędu średniego
7
Łuk koszowy to:
1) zespół następujących po sobie łuków kołowych o różnych promieniach, zakrzywionych w tym samym
kierunku
2) inaczej zespół łuków odwrotnych
3) zespół serpentyn
4) inaczej parabola sześcienna
8
Szkic dokumentacyjny należy opracować:
1) przed tyczeniem punktów realizowanego obiektu
2) bezpośrednio po wytyczeniu obiektu
3) podczas pomiarów powykonawczych wybudowanych obiektów
4) w dowolnym czasie realizacji obiektu
9
W trakcie procesu budowlanego geodeta przekazuje wyniki pomiarów:
1) inwestorowi
2) kierownikowi budowy
3) projektantowi
4) inspektorowi nadzoru inwestycyjnego
10
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Który z dokumentów przygotowuje się w oparciu o plan zagospodarowania terenu:
1) szkic tyczenia
2) szkic dokumentacyjny
3) plan robót ziemnych
4) szkic kontrolny
11
Geodezyjne pomiary przemieszczeń obiektu i jego podłoża oraz wyznaczenie odkształceń obiektu
w trakcie budowy wykonywane są jeżeli:
1) budowane są obiekty przemysłowe
2) są przewidziane w projekcie lub na wniosek uczestnika procesu budowlanego
3) wysokość budynków przekracza 10m
4) budowa dotyczy terenów w pobliżu eksploatacji górniczej
12
Dokumentacja geodezyjno-kartograficzna sporządzana w wyniku geodezyjnej inwentaryzacji powykonawcze
podstawą wprowadzenia zmian:
1) w miejscowym planie zagospodarowania przestrzennego
2) w księgach wieczystych
3) na mapie zasadniczej
4) w projekcie realizowanego obiektu
13
Uzgodnień usytuowania projektowanych sieci uzbrojenia terenu dokonuje się na wniosek:
1) kierownika budowy
2) organu wydającego pozwolenie na budowę
3) inwestora lub jego upoważnionego przedstawiciela
4) projektanta
14
Mapę do celów projektowych można sporządzić w układzie lokalnym dla danej inwestycji w przypadku:
1) lokalizacji inwestycji na terenach wiejskich
2) budowy pojedynczych obiektów o prostej konstrukcji usytuowanych w granicach jednej nieruchomości, prz
mapy zasadniczej w odpowiedniej skali
3) gdy teren objęty inwestycją nie przekracza powierzchni 1 ha
4) budowy związanej z regulacją rzek
15
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Stała dodawania to parametr określany dla:
1) Dalmierza elektrooptycznego,
2) Niwelatora cyfrowego,
3) Instrumentu GPS,
4) Zestawu dalmierz-reflektor
16
Niwelatory cyfrowe oraz łaty niwelacyjne kodowe różnych producentów:
1) Są wzajemnie kompatybilne
2) Nie są wzajemnie kompatybilne
3) Używają tego samego kodu
4) Mogą być używane razem po wprowadzeniu odpowiedniej poprawki
17
Instrumenty klasy GNSS pracujące w trybie RTK/RTN pozwalają na osiąganie dokładności rzędu:
1) Lepsze niż milimetr
2) Centymetrowe
3) Decymetrowe
4) Metrowe
18
Podane błędy instrumentalne: błąd kolimacji, inklinacji, błąd indeksu, wyznaczamy:
1) Z pomiarów w jednym położeniu lunety
2) Z pomiarów w co najmniej w 2 położeniach lunety
3) Z pomiarów w co najmniej 3 położeniach lunety
4) Z pomiarów w nie mniej niż 4 położeniach lunety
19
Dalmierzem elektrooptycznym o specyfikacji dokładności 2mm + 2ppm pomierzono odległość 500m
uwzględniając aktualne wartości parametrów atmosferycznych (temperatura, ciśnienie, wilgotność).
Należy się liczyć z błędem około:
1) 1 milimetra
2) 3 centymetrów
3) 3 milimetrów
4) 1 decymetra
20
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
System ATR w tachymetrach elektronicznych:
1) zapewnia poziomość koła poziomego teodolitu
2) umożliwia automatyczne przejście do drugiego położenia lunety
3) pozwala na bezreflektorowy pomiar odległości
4) zapewnia precyzyjne wycelowanie na środek reflektora
21
Poprawki trasowania:
1) wprowadza się w przypadku osnów realizacyjnych nieregularnych
2) wprowadza się do współrzędnych nominalnych, aby otrzymać współrzędne wyrównane
3) nie powinny być obliczane metodą najmniejszych kwadratów
4) wprowadza się fizycznie w terenie
22
Przy sporządzaniu mapy do celów projektowych nie bierze się pod uwagę:
1) linii zabudowy
2) szkiców dokumentacyjnych
3) nakładki W mapy zasadniczej
4) projektowanych sieci uzbrojenia terenu
23
Do badania przemieszczeń fundamentu służy 6 reperów. Przy założeniu, że fundament jest płytą sztywną, lic
obserwacji nadliczbowych w wyrównaniu parametrów przemieszczeń pionowych wynosi:
1) 0
2) 2
3) 3
4) 4
24
Urządzenia naziemne uzbrojenia terenu należą do:
1) I grupy dokładnościowej szczegółów sytuacyjnych
2) II grupy dokładnościowej szczegółów sytuacyjnych
3) IV grupy dokładnościowej szczegółów sytuacyjnych
4) Nie należą do żadnej
25
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Urządzenia podziemne uzbrojenia terenu należą do:
1) I grupy dokładnościowej szczegółów sytuacyjnych
2) II grupy dokładnościowej szczegółów sytuacyjnych
3) IV grupy dokładnościowej szczegółów sytuacyjnych
4) Nie należą do żadnej
26
Metoda pośredniej lokalizacji metalowych przewodów podziemnych niebędących pod napięciem polegająca
bezpośrednim podpięciu generatora do przewodu nosi nazwę:
1) metody indukcyjnej
2) metody galwanicznej
3) metody Power
4) metody radio
27
Geodezyjna inwentaryzacja sieci uzbrojenia terenu jest czynnością geodezyjną, która:
1) nie podlega zgłoszeniu do właściwego terenowego ośrodka dokumentacji geodezyjno-kartograficznej
2) podlega zgłoszeniu do właściwego terenowego ośrodka dokumentacji geodezyjno-kartograficznej
3) nie podlega zgłoszeniu do właściwego terenowego ośrodka dokumentacji geodezyjno-kartograficznej,
chyba, że wymaga tego inwestor
4) nie podlega zgłoszeniu do właściwego terenowego ośrodka dokumentacji geodezyjno-kartograficznej,
chyba że wymaga tego kierownik budowy
28
Na błąd położenia ostatniego punktu w ciągu wiszącym ma/mają wpływ:
1) tylko błąd położenia punktu nawiązania
2) tylko błędy pomiaru kątów poziomych w tym ciągu
3) tylko błędy pomiaru długości boków w tym ciągu
4) wszystkie wymienione wyżej błędy
29
Pod jakim kątem pionowym α jest nachylony teren jeśli jego spadek wynosi 100%? :
1) 100 gradów
2) 100 stopni
3) 45 stopni
4) 90 stopni
30
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Pomiar wychylenia obiektu wysokiego należy wykonywać :
1) tylko z jednego stanowiska
2) z kilku stanowisk, z każdego w innym dniu
3) z kilku stanowisk w jak najkrótszym czasie
4) podczas silnego wiatru
31
Jakiej wielkości błędu należy się spodziewać przy odłożeniu odległości 3400.00 m dalmierzem o błędzie
standardowym ± (5 mm +5*10
-6
D) pomijając pozostałe błędy?
1) ± 7 mm
2) ± 10 mm
3) ± 12 mm
4) ± 22 mm
32
Rama geodezyjna to:
1) osnowa realizacyjna w postaci prostokąta, związana geometrycznie z układem osiowym obiektu
budowlanego
2) geodezyjnie wytyczony zasięg budowli, najczęściej w formie prostokąta
3) przybite poziomo na palach deski, umiejscowione w narożnikach budowli poza zasięgiem wykopów
4) linia łącząca zewnętrzne punkty osnowy realizacyjnej obiektu budowlanego
33
Krzywizna łuku kołowego to:
1) stosunek promienia łuku do długości łuku
2) stosunek długości łuku do promienia łuku
3) odwrotność promienia łuku
4) odwrotność długości łuku
34
Krzywa przejściowa to:
1) krzywa o krzywiźnie zmieniającej się od zera do R wstawiana między prostą a łuk kołowy
2) krzywa o krzywiźnie zmieniającej się od zera do l/R wstawiana między prostą a łuk kołowy
3) krzywa o krzywiźnie zmieniającej się od zera do h (h - różnica rzędnych terenu między prostą,
a łukiem kołowym)
4) krzywa obrazująca opór jaki musi pokonać pojazd przy przemieszczaniu się z prostej w łuk
35
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 7 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Ławy ciesielskie służą do:
1) regulacji taśmociągów i ciągów technologicznych
2) wielokrotnego odtwarzania osi fundamentów lub obrysów budynku
3) zabezpieczenia wykopów fundamentowych
4) przenoszenia rzędnej na dno wykopu
36
Tyczenie jednoetapowe to:
1) wyznaczanie położenia punktu na podstawie pomiarów kątowych
2) wyznaczanie punktu na podstawie określonego przybliżonego położenia
3) tyczenie na podstawie pomiarów liniowych
4) wyznaczanie położenia z pomiarów bezpośrednich
37
Poziom zera budynku stanowi:
1) wysokość gruntu wokół budynku,
2) wysokość podstawy fundamentu,
3) wysokość pierwszego piętra,
4) wysokość górnej powierzchni stropu piwnic.
38
Do opracowania planu realizacyjnego inwestycji liniowych zlokalizowanych poza terenami zabudowanym
mapy w skali:
1) 1:1000
2) 1:2000
3) 1:5000
4) 1:25 000
39
Pomiary kątowe i liniowe skoordynowane dokładnościowo to:
1)
m
m
l
2)
m
m
l
l
3)
m
m
l
l
4)
m
l
m
l
(gdzie:
- kąt, l - długość, m
- średni błąd pomiaru kąta, m
l
- średni błąd pomiaru
długości,
- zamiennik miary)
40
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 8 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Długość łuku kołowego o promieniu R = 100,00 m. i kącie zwrotu a = 50
g
00
c
00
cc
wynosi:
1) 75.00 m
2) 78,54 m
3) 80,36 m
4) 100,00 m.
41
Długość stycznej łuku kołowego o promieniu R = 100,00 m. kącie zwrotu 100
g
00
c
00
cc
wynosi:
1) 50.00 m.
2) 70.71 m.
3) 80.60 m
4) 100.00 m.
42
Błąd średni zmierzonej długości 500,000 m wynosi ± 2 mm; błąd względny pomiaru tej długości wyniesie:
1) 1/25 000
2) 1/100 000
3) 1/200 000
4) 1/250 000
43
Współrzędne prostokątne narożnika budynku, w układzie osnowy realizacyjnej wynoszą x=42.00, y=26.29. J
współrzędne biegunowe tego narożnika ?
1) d = 52.38 α = 38
g
.1570
2) d = 50.50 α = 38
g
.0000
3) d = 49.55 α = 35
g
.6051
4) d = 48.00 α = 34
g
.2500
44
W celu dokładnego wytyczenia w terenie kąta a = 38°20'50"odłożono jego wartość przybliżoną
a=38
o
21'00" od znanego kierunku i utrwalono drugi kierunek tego kąta w odległości d = 200,00 m. Jakie pow
przesunięcie liniowe, które ustali dokładnie drugi kierunek tyczonego kąta?:
1) 25 mm
2) 15 mm.
3) 10 mm.
4) 4 mm.
45
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 9 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Rozszyfruj skrót ZUDP:
1) Zakład Uszlachetniania Dalmierzy Precyzyjnych
2) Zespół Uzgadniania Dokumentacji Projektowych
3) Zjazd u Drogowców Powiatowych
4) Ziemski Urząd Dokumentacji Powykonawczej
46
Metoda biegunowa tyczenia lokalizującego polega na:
1) odłożeniu odległości od bieguna
2) odłożeniu kąta i odległości
3) odłożeniu odległości biegunowej
4) wyznaczeniu poprawki w tyczeniu dwuetapowym
47
Dokumentem powstałym w wyniku geodezyjnego opracowania projektu i będącym podstawą
do wykonania tyczenia lokalizującego jest:
1) Szkic dokumentacyjny
2) Projekt konstrukcyjny
3) Sprawozdanie techniczne
4) Projekt tyczenia
48
Dokumentem technicznym wykonanego tyczenia jest:
1) dziennik pomiarowy
2) szkic tyczenia
3) wykaz miar
4) sprawozdanie techniczne
49
Jaka z poniższych Instrukcji Geodezyjnych GUGiK dotyczy „Geodezyjnej obsługi inwestycji?:
1) O-2
2) G-3
3) G-4
4) K-3
50
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 10 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Jakie z poniższych elementów nie należą do obiektów małej architektury:
1) Huśtawka
2) W odotrysk
3) W olno stojący maszt antenowy
4) Śmietnik
51
Jakiej metody niwelacji nie stosuje się w pracach budowlano-montażowych:
1) Niwelacji barometrycznej
2) Niwelacji trygonometrycznej
3) Niwelacji geometrycznej
4) Niwelacji laserowej
52
Program „przeniesienie wysokości” w tachymetrze Leica TC 407 służy do :
1) Wyznaczenia wysokości inwentaryzowanych punktów
2) Wyznaczenia przewyższenia pomiędzy dwoma punktami
3) Wyznaczenia wysokości stanowiska instrumentu
4) Transmisji wysokości punktów z tachymetru do urządzenia zewnętrznego
53
Mając dany promień łuku kołowego R = 1000 m oraz kąt środkowy (kąt zwrotu stycznych) α = 50
g
podaj
prawidłową długość stycznej głównej tego łuku:
1) 382,683 m
2) 414,214 m
3) 785,398 m
4) 390,181 m
54
Maj ąc dany promień łuku kołowego R = 1000 m oraz kąt środkowy (kąt zwrotu stycznych) α = 50g podaj
prawidłową długość tego łuku :
1) 382,683 m
2) 414,214 m
3) 785,398 m
4) 390,181 m
55
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 11 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Przy realizacji sieci uzbrojenia terenu dopuszczalne jest odstępstwo od uzgodnionego projektu,
nieprzekraczające dla gruntów zabudowanych:
1) 0,10 m
2) 0,30 m
3) 0,50 m
4) 0,70 m
56
Osoby wykonujące prace geodezyjne i kartograficzne mają prawo wstępu na grunt i do obiektów
budowlanych oraz dokonywania niezbędnych czynności związanych z wykonywanymi pracami na podstawi
1) świadectwa nadania uprawnień zawodowych
2) umowy o roboty geodezyjne
3) potwierdzonego przez ośrodek dokumentacji geodezyjnej i kartograficznej zgłoszenia roboty geodezyjnej
4) dyplomu ukończenia studiów wyższych na kierunku geodezja i kartografia
57
Zgłoszenia do ośrodka dokumentacji geodezyjnej i kartograficznej wymagają prace:
1) tyczenie obiektów budowlanych oraz pomiary budowlano–montażowe,
2) pomiary wykonywane w celu ustalenia objętości mas ziemnych,
3) pomiary wykonywane w celu aktualizacji mapy zasadniczej,
4) pomiary odkształceń i przemieszczeń budowli i urządzeń.
58
Założenie i prowadzenie geodezyjnej ewidencji sieci uzbrojenia terenu zapewniają:
1) wójt,
2) starosta,
3) marszałek województwa,
4) wojewoda.
59
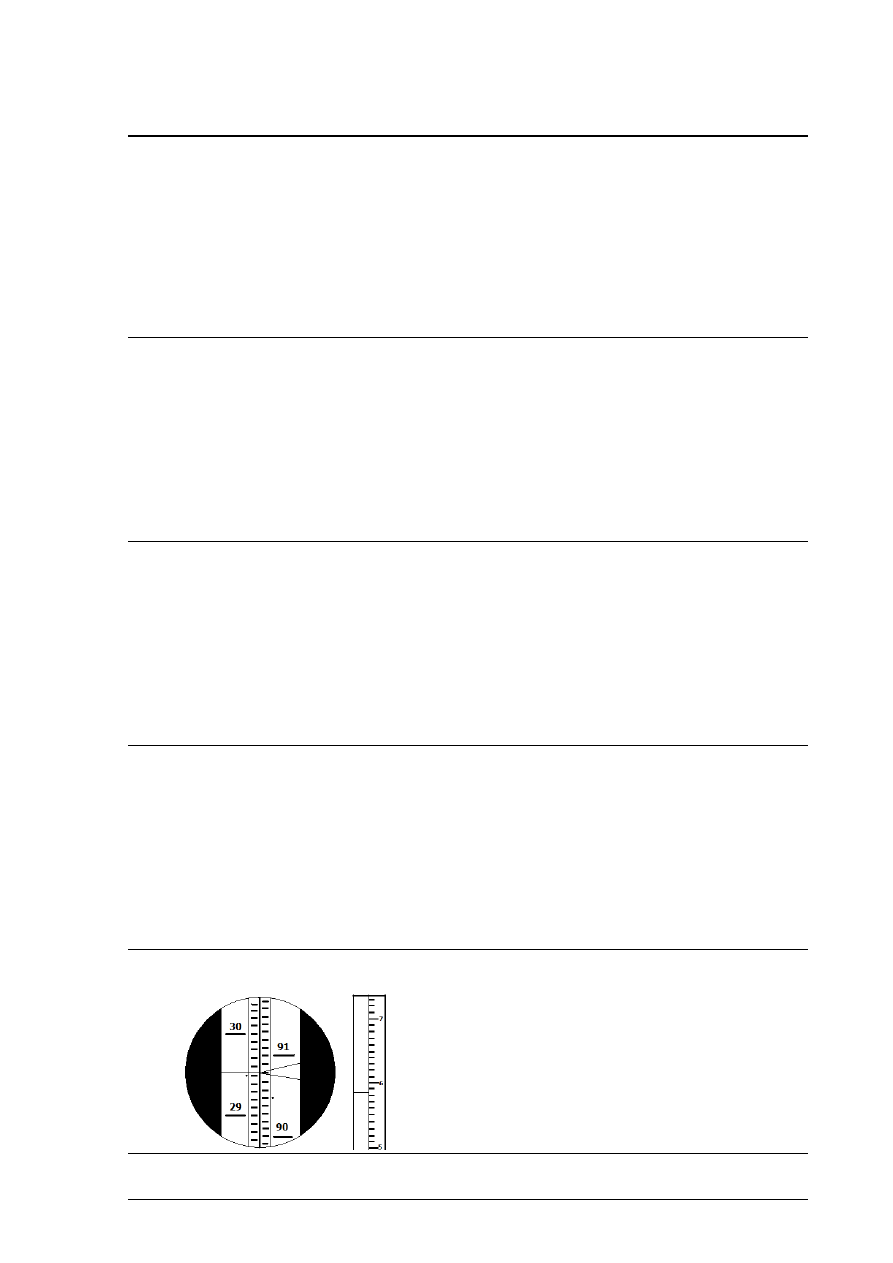
Wykonaj odczyt na niwelatorze precyzyjnym KONI 007 ZEISS w sytuacji jak na rysunku:
1) 908584
2) 295584
3) 298590
4) 908588
60
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 12 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Zaznacz nieprawdzi wą informacje na temat szkicu tyczenia:
1) na szkicu zaznacza się między innymi obiekty projektowane, miary konieczne do wytyczenia ich, obliczon
miary kontrolne itp.
2) wykonuje się go w dwóch kolorach: czer wonym i zielonym
3) wykonuje się dwa identyczne egzemplarze, z czego jeden dołącza się do dziennika budowy, a drugi do
dziennika prac geodezyjnych.
4) jeżeli naniesienie na tym samym szkicu zarówno miar kontrolnych jak i miar do tyczenia powodowałoby
nieczytelność rysunku, wykonuje się dwa odrębne szkice.
61
Maksymalny, błąd względny wyznaczenia objętości dla odpadów przemysłowych nie powinien przekraczać:
1) 10%
2) 17%
3) 3%
4) 5%
62
Różnica między odczytami na łacie lewymi i prawymi dla instrumentu KONI 007 ZEISS wynosi:
1) 60560 [j]
2) 60650 [mm]
3) 600660 [mm]
4) 606500[j]
63
Jaką metodą najlepiej ustalić objętość mas ziemnych dla nasypu kolejowego? :
1) przekroje pionowe
2) przekroje poziome
3) siatka kwadratów
4) siatka trójkątów
64
Proszę wskazać właściwe określenie przykładowej klasy technicznej drogi:
1) główna przyspieszona,
2) twarda ulepszona,
3) główna,
4) krajowa.
65
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 13 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Prędkość projektowa jest podstawowym parametrem techniczno –ekonomicznym i służy m.in. do ustalania:
1) klasy technicznej drogi,
2) wartości granicznych parametrów geometrycznych drogi,
3) kategorii terenu,
4) minimalnej odległości widoczności na zatrzymanie.
66
W przypadku dróg ogólnodostępnych zalecane wymiary skraj ni dl a poj azdów wynoszą (szerokość x
wysokość):
1) 3,5 m x 5,0 m
2) pa s drogowy x 3,5 m
3) korona drogi x 4,5 m
4) j ezdnia x 3,5 m
67
Klotoida stosowana jako krzywa przejściowa jest krzywą matematyczną, której:
1) krzywizna maleje proporcjonalnie do długości łuku mierzonej od punktu początkowego,
2) krzywizna jest proporcjonalna do promienia,
3) krzywizna wzrasta proporcjonalnie do długości łuku mierzonej od punktu początkowego,
4) iloczyn odległości mierzonej od punktu początkowego i krzywizny jest stały,
68
Projekt niwelety drogi nie zależy od:
1) rozwiązania odwodnienia,
2) bilansu r obót ziemnych,
3) rodzaju podłoża gruntowego,
4) miarodajnego godzinowego natężenia ruchu.
69
Koordynując wzajemne położenie elementów geometrycznych osi drogi w planie i pr zekroju podłużnym nie
należy stosować następujących rozwiązań:
1) łączyć odcinków prostych w planie na odcinkach o stałym pochyleniu w przekroju podłużnym,
2) projektować łuków wypukłych w przekroju podłużnym na odcinkach prostych w planie,
3) łączyć łuków wypukłych w przekroju podłużnym z odcinkami krzywoliniowymi w planie,
4) stosować nadmiernego wzajemnego przesunięcia wierzchołków łuku wypukłego w przekroju podłużnym o
łuku w planie.
70
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 14 z 15
Geodezja inżynieryjna i budownictwo
Egzamin dyplomowy inżynierski
Pochylenie poprzeczne jezdni drogi o pr zekroju dwujezdniowym wykonuje się:
1) zawsze jako daszkowe,
2) zawsze jako jednostronne,
3) na prostej w planie daszkowe, a na łuku jednostr onne,
4) na prostej w planie jednostronne, a na łuku daszkowe.
71
Na wierzchnia półsztywna w podziale ze względu na od kształcalność pod wpływem powtarzaj ących się
obciążeń to następujące rozwiązanie:
1) bitumiczna warstwa ści er alna i wiążąca na podbudowie z kruszywa stabili zowanego mechani cznie,
2) bitumiczna warstwa ści er alna i wiążąca na sztywnej pod budowie,
3) nawi erzchni a z betonu cemen toweg o,
4) nawi erzchni a twarda nieulepszona.
72
Do fundamentów pośrednich zaliczamy:
1) ruszt fundamentowy,
2) fundament belkowy,
3) pale fundamentowe,
4) skrzynie fundamentowe.
73
Do stropów gęstożebrowych zaliczamy:
1) drewniany strop belkowy,
2) strop Kleina,
3) strop płytowo-żebrowy,
4) strop Teriva.
74
Proszę
wskazać
właściwy układ warstw w przekroju poprzecznym klasycznego stropodachu pełnego (od
wnętrza na zewnętrz):
1) konstrukcja stropu + izolacja termiczna + pokrycie dachowe,
2) konstrukcja stropu + paroizolacja + izolacja termiczna + pokrycie dachowe,
3) konstrukcja stropu + paroizolacja + izolacja termiczna + przestrzeń
wentylowana + konstrukcja dachu +
pokrycie dachowe,
4) konstrukcja stropu + izolacja termiczna + paroizolacja + pokrycie dachowe.
75
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 15 z 15
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
Kształt i rozmiary elipsoidy obrotowej jednoznacznie określa następujący zbiór
parametrów:
1) a, b,
2) a, b, f ,
3) a, e
2
, f,
4) a, e’, b,
gdzie: a - półoś duża elipsoidy, b - półoś mała elipsoidy, e i e’ odpowiednio pierwszy
i drugi mimośród elipsoidy obrotowej, f - spłaszczenie elipsoidy.
1
Ró żnica między półosią dużą a półosi ą małą elipsoidy aproksymującej powierzchnię
Ziemi wynosi w przybliżeniu :
1) 2.1 km,
2) 12 km,
3) 21 km,
4) 36 km.
2
Półoś duża elipsoidy ziemskiej wynosi w przybliżeniu:
1) 6278 km,
2) 6299 km,
3) 6378 km,
4) 6478 km.
3
Przez trójkąt geodezyjny rozumiemy trójkąt:
1) na sferze,
2) na płaszczyźnie Gaussa-Kruegera,
3) na elipsoidzie obrotowej,
4) na sferze o średnim promieniu krzywizny elipsoidy obrotowej.
4
Bokami trójkąta geodezyjnego są:
1) linie lokso dromy,
2) linie geodezyjne,
3) łuki kół wielkich,
4) cięciwy łączące poszczegó lne punkty na elipsoidzie obrotowej.
5
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 10
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
Przez nadmiar sferyczny rozumiemy :
1) wartość różnicy między polem powierzchni trójkąta sferycznego a odpowiadającym mu
polem trójkąta płaskiego,
2) wartość różnicy między sumą boków trójkąta sferycznego a odpowiadającą mu
sumą boków trójkąta płaskiego,
3) wartość różnicy między sumą kątów trójkąta sferycznego a odpowiadającą mu
sumą kątów trójkąta płaskiego,
4)
wartość różnicy między sumą kątów trójkąta sferycznego a odpowiadającą mu
sumą boków trójkąta płaskiego
.
6
We wzorach trygonometrii sferycznej długość boków w trójkątach sferycznym wyraża się:
1) miarą liniową,
2) miarą kątową
3) miarą czasową,
4) miarą sferyczną.
7
Doba gwiazdowa:
1) jest krótsza od doby słonecznej o 3’ 56”,
2) jest dłuższa od doby słonecznej o 3’ 56”,
3) jest zmienna w zależności od pory roku,
4) tr wa tyle samo co doba słoneczna.
8
Które ze współrzędnych gwiazdy: t-kąt godzinny i z-odległość zenitalna, są prawdziwe dla zjawiska wschodu
gwiazdy:
1) t
( 0
h
;24
h
) i z = 90°,
2) t
(0
h
;12
h
) i z = 0°,
3) t
( 12
h
;24
h
) i z = 90°,
4) t
(12
h
;24
h
) i z = 0°.
9
Gwiazda przechodząc przez I wertykał po stronie wschodniej ma azymut geodezyjn y r ówny:
1) 0°,
2) 90°,
3) 180°,
4) 270°.
10
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 10
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
W astronomii zjawisko precesji związane jest z:
1) niejednostajnością ruchu Ziemi wokół Słońca,
2) okresowym chwianiem się osi obrotu Ziemi wywołanym przez Księżyc,
3) zmiana położenia bieguna wynikającą z przemieszczania się płyt kontynentalnych,
4) pozorną zmianą położenia gwiazd wynikającą z przemieszczania się obserwatora.
11
Równanie czasu w astronomii określa różnicę między czasami:
1) słonecznego prawdziwego i średniego,
2) słonecznego prawdziwego i gwiazdowego średniego,
3) słonecznego średniego i gwiazdowego prawdziwego,
4) gwiazdowego średniego i prawdziwego.
12
Lokalny czas gwiazdowy równy jest:
1) deklinacji gwiazdy w momencie jej górowania,
2) rektascensji gwiazdy w momencie jej górowania,
3) deklinacji gwiazdy w pier wszym wertykale,
4) rektascensji gwiazdy o północy.
13
Jaką wartość przyjmuje czas gwiazdowy w momencie górowania gwiazdy:
1) S = 0
h
,
2) S = 12
h
,
3) S = t,
4) S = α.
14
Jaką wartość przyjmuje azymu t astronomiczny w mo mencie kulminacji gwi azdy, jeżeli zjawisko to zachodzi m
biegunem a zenitem:
1) A = 180°,
2) A = 0°,
3) A = t,
4) A = α + t.
15
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 10
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
Równanie Clairauta linii geodezyjnej ma postać :
1) Ncos(
)cos(α) = c,
2) Mcos(
)cos(α) = c,
3) Ncos(
)sin(α) = c,
4) Mcos(
)sin(α) = c.
16
Zadanie geodezyjne wprost dotyczy:
1). ob liczenia współr zędnych geodezyjnych punktu P
2
i azymutu odwrotnego A
21
li nii
geo dezyjnej na podstawie zn anych wspó łr z. geodezyjnych punktu P
1
, długości l inii
geodezyjnej s
12
oraz azymutu A
12 ,
2). ob liczenia współr zędnych geodezyjnych punktu P
2
i azymutu odwrotnego A
12
(wprost)
linii geodezyjnej na podstawie znanych współrzędnych geodezyj nych pu nktu P
1
, długości lini i
geodezyjnej s
12
oraz azymutu A
21
(o dwrotnego),
3). ob liczenia współr zędnych geodezyjnych punktu P
2
na podstawie znanych współr zędnych
geodezyjnych punktu P
1
azymutu A
12
(wprost) oraz azymutu A
2 1
(odwrotnego),
4). ob liczenia współr z. geodezyjnych punktu P
2
na pod stawie znanych współrz. geodezyj nych
punktu P
1
, długości linii geodezyjnej s
12
i średniego promi eni a krzywizny w punkcie P
1
.
17
Zadanie geodezyjne odwrotne dotyczy:
1) obliczenia długości linii geodezyjnej s
12
łączącej na powierzchni elipsoidy dwa punkty
o znanych współrzędnych geodezyjnych oraz obliczenia azymutów l inii geodezyjnej wprost
i odwrotnego(tj. A
12
, A
2 1
),
2) obliczenia długości linii geodezyjnej s
12
łączącej na powierzchni elipsoidy dwa punkty
o znanych współrzędnych geodezyjnych,
3) obliczenia długości linii geodezyjnej s
12
łączącej na powierzchni elipsoidy dwa punkty
o znanych współrzędnych geodezyjnych oraz znanego azymutu wprost A
1 2,
4) obliczenia długości linii geodezyjnej s
12
łączącej na powierzchni elipsoidy dwa punkty
o znanych współrzędnych geodezyjnych oraz znanego azymutu odwrotnego A
21.
18
Długo ść równoleżnika el ipsoi dy obrotowej wyraża się za pomocą wzoru:
1) 2πb,
2) 2πN,
3) 2πNcos(
),
4) 2πbcos(
).
19
Przybliżona wartość spłaszczenia elipsoidy ziemskiej wyraża się liczbą:
1) 1:100,
2) 1:200,
3) 1:300,
4) 1:400.
20
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 10
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
Wartości głównych promieni krzywizny przekroju normalnego elipsoidy obrotowej są:
1) równe na biegunie,
2) równe na szer. 45° ,
3) równe na równiku,
4) zawsze różne.
21
Maksymalną war tość przyspieszenie siły ciężkości na poziomie morza osiąga na:
1) równiku,
2) szerokości 23.5°,
3) szerokości 45°,
4) na biegunach.
22
Dwie różne powierzchnie ekwipotencjalne w pobliżu Ziemi:
1) są do siebie równoległe,
2) zbliżają się do siebie w miarę poruszania się od bieguna do równika,
3) oddalają się do siebie w miarę poruszania się od bieguna do równika,
4) przecinają się na szerokości 23.5°.
23
Linia pionu w pobliżu powierzchni Ziemi przechodząca przez dwie różne powierzchnie ekwipotencjalne jest:
1) odcinkiem linii prostej,
2) odcinkiem krzywej wypukłością zwróconą w kierunku równika,
3) odcinkiem krzywej wypukłością zwróconą w kierunku bieguna,
4) jest odcinkiem krzywej śrubowej.
24
Przez undulację geoidy rozumiemy:
1) falowanie geoidy nad elipsoidą odniesienia,
2) odstęp geoidy od elipsoidy odniesienia,
3) odstęp geoidy od fizycznej powierzchni Ziemi,
4) odstęp geoidy od dna morza.
25
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 10
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
Redukcja wolnopowietrzna (Faye'a) jest to redukcja grawimetryczna:
1) uwzględniająca tylko wpływ wysokości stanowiska pomiarowego ponad geoidą,
2) uwzględniająca wpływ pr zyciągania mas znajdujących się ponad geoidą,
3) uwzględniająca wpływ topografii terenu wokół stanowiska,
4) ściśle związana z redukcją izostatyczną.
26
Wysokość normalną w systemie Mołodeńskiego określa odległość:
1) fizycznej powierzchni Ziemi od geoidy,
2) elipsoidy ekwipotencjalnej od telluroidy,
3) telluroidy od fizycznej powierzchni Ziemi,
4) fizycznej powierzchni Ziemi od elipsoidy.
27
Jeśli w danym kierunku A-B odchylenie linii pionu wynosi $ 10''$ to różni ca przewyższenia
pomierzonego niwel atorem i techniką GPS między reperami A i B oddalonymi o 1 km wyniesie:
1) będzie bliska zeru,
2) ok. 1 cm,
3) ok. 5 cm,
4) ok. 10 cm.
28
Po spoziomowaniu teodolitu jego oś pionowa wyznacza:
1) zenit geodezyjny,
2) zenit astronomiczny,
3) normalną do lokalnej elipsoidy odniesienia,
4) normalną do elipsoidy globalnej.
29
Aktualnie obowiązująca w Polsce elipsoida GRS'80 jako elipsoida odniesienia:
1) jest elipsoidą geocentryczną lokalną,
2) jest elipsoidą quasi-geocentryczną lokalną,
3) jest elipsoidą globalną (ziemską),
4) pokr ywa się z geoidą w basenie Morza Czarnego.
30
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 10
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
Anomalia wysokości ζ okr eśla w systemie Mołodeńskiego:
1) odstęp geoidy od elipsoidy odniesienia,
2) odstęp geoidy od fizycznej powierzchni Ziemi,
3) odstęp quasi-geoidy od elipsidy,
4) odstęp quasi-geoidy od telluroidy.
31
Wysokość ortometryczna jest to odległość:
1) punktu na fizycznej powierzchni Ziemi od geoidy zmierzona wzdłuż linii pionu,
2) punktu na fizycznej powierzchni Ziemi od geoidy zmierzona wzdłuż linii prostej,
3) punktu na fizycznej powierzchni Ziemi od elipsoidy odniesienia zmierzona wzdłuż normalnej,
4) punktu na telluroidzie od quasi-geoidy zmierzona wzdłuż normalnej linii pionu.
32
Aktualnie w Polsce obowiązuje system wysokości:
1) ortometrycznych,
2) normalnych,
3) dynamicznych,
4) geopotencjalnych.
33
Jakiej wielkości jednostką jest Gal:
1) pochodnej przyspieszenia,
2) przyspieszenia,
3) potencjału grawitacyjnego,
potencjału siły ciężkości.
34
Podstawowe równanie geodezji fizycznej dotyczy wyznaczenia:
1) odstępów geoidy od elipsoidy odniesienia,
2) odstępów topograficznej powierzchni Ziemi od geoidy,
3) odstępów topograficznej powierzchni Ziemi od elipsoidy,
4) rozkładu gęstości mas w skorupie ziemskiej.
35
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 7 z 10
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
Altimetria satelitarna służy do:
1) wyznaczania średniego poziomu mórz i oceanów,
2) wyznaczania przebiegu geoidy na obszarze lądów,
3) wyznaczania wysokości szczytów górskich,
4) wyznaczania topografii dna oceanów.
36
Pomiary interferometryczne bardzo długich baz (VLBI) wykorzystują sygnały radiowe emitowane przez:
1) satelity geostacjonarne,
2) pulsary (gwiazdy neutronowe),
3) quasary,
4) satelity systemu GPS.
37
Okres obiegu wokół Ziemi satelitów GPS wynosi:
1) pół doby gwiazdowej,
2) pół doby średniej słonecznej,
3) pół doby prawdziwej słonecznej,
4) 12
h
58
m
.
38
Jeśli trakcie j ednej sesji pomiarowej wykorzystuje się równocześnie 7 odbio rników GPS
umieszczonych na siedmiu punktach , to równocześnie wyznacza się:
1) 14 wektorów,
2) 18 wektorów,
3) 21 wektorów,
4) 28 wektorów.
39
Czym ch arakteryzują się sygnały radiowe L1 emitowane przez nadajniki GPS:
1) wszystki e satelity emitują sygnały o takiej samej długości fal i L1,
2) każdy z sa telitów emituje sygnał o przypisanej mu długość fali L1,
3) tylko satel ity znajdujące się po przeciwnych stronach Ziemi emitują sygnały o ta kiej
samej długości fali,
4) tylko satel ity znajdujące się na tej samej płaszczyźnie emituj ą sygna ły o takiej samej dług.
40
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 8 z 10
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
Obserwowane w pomiarach sygnału GPS zjawisko utraty cykli fazowych (cycle slips)
najczęściej jest związane z:
1) programową degradacją systemu GPS w celu zmniejszenia dokładności
wyznaczania pozycji w nawigacji,
2) wynikiem chwilowej utraty łączności między odbiornikiem a sa telitą,
3) wywołane przez burze magnetyczne,
4) wywołane przez wyładowania atmosferyczne.
41
W pracach geodezyjnych wykorzystujących technologię GPS znalazły powszechne zastosowanie:
1) pojedyncze różnicowe obserwacje fazy,
2) podwójne różnicowe obserwacje fazy,
3) potrójne różnicowe obserwacje fazy,
4) podwójne różnicowe obserwacje kodowe .
42
Przez sieć POLREF rozumiemy:
1) precyzyjną sieć geodezyjną I- szego rzędu utworzoną na ter ytorium Polski
na podstawie pomiarów GPS,
2) precyzyjną sieć wysokościową I-szeg o rzędu na terenie Polski,
3) precyzyjną sieć gra wimetryczną I- szego rzędu na terenie Polski,
4) si eć stacji laserowych w Pol sce.
43
Pomiary GPS umożliwiają integrację:
1) pomiarów niwelacyjnych i kątowych,
2) praktycznie wszystkich klasycznych pomiarów geodezyjnych,
3) pomiarów altimetrycznych,
4) pomiarów meteorologicznych.
44
Zgodnie z zasadą dynamiki i prawem powszechnego ciążenia ruch satelity może odbywać się po:
1) spirali,
2) klotoidzie,
3) hiperboli,
4) cykloidzie.
45
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 9 z 10
Geodezja wyższa, satelitarna i astronomia geodezyjna
Egzamin dyplomowy inżynierski
III prawo Keplera mówi, że:
1) okres obiegu satelity zależy od rozmiaru orbity,
2) prędkość kątowa satelity jest stała,
3) okres obiegu satelity zależy tylko od masy satelity,
4) prędkość polowa satelity jest stała.
46
Ruch perturbowany spowodowany jest:
1) ciśnieniem światła słonecznego,
2) zmienną temperaturą,
3) zmienna wilgotnością,
4) aktywnościa jonosfery.
47
Sygnał radiowy w troposferze:
1) jest przyśpieszany,
2) jest opóźniany,
3) jest okresowo przyspieszany i opóźniany,
4) nie zmienia się.
48
Położenie środka fazowego anteny do odbioru radiowych sygnałów satelitarnych:
1) zależy tylko od wysokości horyzontalnej satelity,
2) zależy od wysokości horyzontalnej i azymutu satelity,
3) zależy tylko od azymutu,
4) nie zależy od kierunku, z którego dochodzi sygnał.
49
Serwis POZGEO-D systemu ASG-EUPOS pozwala na:
1) odbieranie poprawek do pomiarów w trybie RTK,
2) pobranie danych obserwacyjnych ze stacji wirtualnych,
3) automatyczne opracowanie obserwacji satelitarnych GPS,
4) pobranie orbity precyzyjnej dla satelitów systemu GPS.
50
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 10 z 10

Kartografia
Egzamin dyplomowy inżynierski
1
W odwzorowani u regularnym obrazem krzywej jest:
1) prosta,
2) punkt,
3) krzywa,
4) łamana.
2
Siatka kartograficzna na mapie to obraz:
1) linii geodezyjnych,
2) południków i równoleżników,
3) łuków kół wielkich i małych,
4) linii parametrycznych.
3
Elementarna skala długości - m w dowolnym odwzorowaniu regularnym nie będącym wiernokątnym
zależy wyłącznie od:
1) położenia punktu,
2) położenia punktu i azymutu,
3) azymutu,
4) długości.
4
Zniekształcenia długości - Z
m
w danym odwzorowaniu kartograficznym określa zależność (elementarna skala
długości - m) :
1) Z
m
= m – 1,
2) Z
m
= m – 2,
3) Z
m
= m + 2,
4) Z
m
= m + 1.
5
Zniekształcenie pól - Z
p
w danym odwzorowaniu kartograficznym określa zależność
(elementarna skala pola -p) :
1) Z
p
= p + 2,
2) Z
p
= p – 2,
3) Z
p
= p – 1,
4) Z
p
= p + 1.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 10

Kartografia
Egzamin dyplomowy inżynierski
6
Odwzorowanie jest równopolowe, gdy skale zniekształceń długości m
B
i m
L
, spełniają zależność:
1) m
B
. m
L
= 1,
2) m
B
. m
L
1,
3) m
B
- m
L
1,
4) m
B
- m
L
= 1.
7
Odwzorowanie jest równokątne, gdy utworzony kąt
pomiędzy liniami parametrycznymi siatki i skale
zniekształceń długości m
B
i m
L
spełniają zależność:
1) m
B
= m
L
90
0
,
2) m
B
m
L
90
0
,
3) m
B
m
L
= 90
0
,
4) m
B
= m
L
= 90
0
.
8
Kierunki główne w odwzor owaniu wyznaczają linie siatki o kącie
pomiędzy liniami, wynoszącym:
1)
90
0
,
2) = 90
0
,
3)
> 90
0
,
4) < 90
0
.
9
W którym odwzorowaniu kartograficznym nie ma kierunków głównych:
1) równokątnym,
2) równopolowym,
3) wiernoodległościowym w kierunku południkowym ,
4) dowolnym.
10
Elipsa zniekształceń przyjmuje postać okręgu, gdy odwzorowanie kartograficzne jest:
1) równopolowe,
2) równoodległościowe,
3) równokątne,
4) dowolne,
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 10


Kartografia
Egzamin dyplomowy inżynierski
11
Odwzorowanie kartograficzne, w którym punkt przyłożenia powierzchni rzutowani a jest styczny
do kuli w biegunie, nazywamy odwzorowaniem:
1) normalnym,
2) dowol nym,
3) ukośnym,
4) poprzecznym.
12
Odwzorowanie kartograficzne, w którym punkt przyłożenia powierzchni rzutowani a jest styczny
do kuli w równiku, nazywamy odwzorowaniem:
1) normalnym,
2) dowol nym,
3) ukośnym,
4) poprzecznym.
13
Odwzorowanie kartograficzne, w którym punkt przyłożenia powierzchni rzutowani a jest styczny do kuli w dowolnym
jej punkcie (z wyjątkiem bieguna i równika) nazywamy:
1) odwzorowani em normalnym,
2) odwzorowani em ukośnym,
3) odwzorowani em poprzecznym,
4) odwzorowani em dowo lnym.
14
Odwzorowanie kartograficzne, w którym obr azem południ ków są p roste, a obrazem równoleżników są okręgi
współśrodkowe, nazywamy odwzor owaniem:
1) azymutal nym normalnym,
2) walcowym normalnym,
3) stożkowym normalnym,
4) pseudoazymutalnym.
15
Odwzorowanie kartograficzne, w którym obr azem południ ków są p roste lu b odcinki ró wnoległe względem siebie i
prostopa dłe do prostolini owego obrazu równ oleżnika, nazywamy o dwzorowaniem:
1) azymutal nym normalnym,
2) walcowym normalnym,
3) stożkowym normalnym,
4) pseudowalcowym.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 10

Kartografia
Egzamin dyplomowy inżynierski
16
Odwzorowanie kartograficzne, w którym obrazem równoleżników są łuki okręgów współśrodkowych,
a obrazem południków są odcinki lub półproste prostopadłe do obrazów równoleżników
nazywamy odwzorowaniem:
1) azymutalnym normalnym,
2) walcowym normalnym,
3) stożkowym normalnym,
4) pseudostożkowym.
17
Odwzorowanie azymutalne normalne kuli jest równonokątne, gdy
=90
o
i jest spełniona relacja:
1) m
= m
2) m
m
3) m
> m
4) m
< m
( m
-skala długości w kierunku równoleżnikowym,
m
- skala długości w kierunku południkowym,
- kąt pomiędzy kierunkami w obrazie)
18
Odwzorowanie azymutalne normalne kuli jest równoodległościowe w kierunku równoleżnikowym,
gdy m
- dowolne i jest spełniona relacja:
1) m
= 1
2) m
> 1
3) m
1
4) m
< 1
( m
-skala długości w kierunku równoleżnikowym, m
- skala długości w kierunku południkowym)
19
Odwzorowanie azymutalne normalne kuli jest równopolowe, gdy:
1) m
. m
= 1
2) m
. m
1
3) m
+ m
= 1
4) m
- m
= 1
( m
-skala długości w kierunku równoleżnikowym, m
- skala długości w kierunku południkowym)
20
W odwzorowaniu Mer catora kulę odwzorowuje się na
1) pobocznicę walca,
2) dowolną powierzchnię,
3) pobocznicę stożka,
4) płaszczyznę.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 10


Kartografia
Egzamin dyplomowy inżynierski
21
Odwzorowanie Mercatora jest najczęściej stosowane w:
1) nawigacji mor skiej,
2) geografii,
3) nawigacji lotniczej,
4) hydrografii.
22
Odwzorowanie Gaussa-Krügera jest odwzor owaniem:
1) kuli na płaszczyznę,
2) elipsoidy na płaszczyznę,
3) elipsoidy na „walec”,
4) elipsoidy na „stożek”.
23
Odwzorowanie Gaussa-Krügera jest odwzor owaniem:
1) walcowym normalnym,
2) azymutalnym normalnym,
3) stożkowym normalnym,
4) walcowym poprzecznym.
24
Odwzorowanie Gaussa-Krügera jest odwzorowaniem:
1) równokątnym,
2) równopolowym,
3) równoodległościowym,
4) dowolnym.
25
Wartość skali długości w południkach osiowych - m
o
, odwzorowania Gaussa-Krügera, wynosi:
1) m
o
=1
2) m
o
=0,9996
3) m
o
=1,0023
4) m
o
=0,9983
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 10


Kartografia
Egzamin dyplomowy inżynierski
26
Pasy południkowe odwzorowania Gaussa-Krügera dla opracowań kartograficznych w dużych skalach
wynoszą:
1) 6
o
2) 2
o
3) 3
o
4) 4
o
27
Pasy południkowe odwzorowania Gaussa-Krügera dla opracowań kartograficznych w średnich skalach
wynoszą:
1) 6
o
2) 2
o
3) 3
o
4) 4
o
28
Dla czterech stref, w układzie współr zędnych prostokątnych płaskich „1965”, zastosowano odwzorowanie
elipsoidy, na:
1) płaszczyznę styczną,
2) płaszczyznę sieczną,
3) pobocznicę walca,
4) pobocznicę stożka.
29
Z ilu stref składa się układ współrzędnych prostokątnych płaski ch „1965”.
1) 3,
2) 5,
3) 4,
4) 6.
30
W układzie współrzędnych prostokątnych płaskich „1965", dla czterech stref zastosowane odwzorowanie:
1) dowolne,
2) quasi-stereograficzne (Roussilhe'a),
3) Gaussa-Krügera,
4) Mercatora.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 10


Kartografia
Egzamin dyplomowy inżynierski
31
Jakie odwzorowanie zastosowano do wyznaczenia układu współrzędnych „GUGiK - 80":
1) normalne stożkowe,
2) normalne Mercatora ,
3) zmodyfikowane guas-istereograficzne,
4) Gaussa-Krügera
32
Państwowy układ współrzędnych geodezyjnych „PL 1992" jest określony z użyciem odwzorowania:
1) Gaussa-Krügera
2) Mercatora
3) Lamberta
4) Albersa
33
Państwowy układ współrzędnych geodezyjnych „PL 1992" jest odwzorowaniem elipsoidy na:
1) płaszczyznę sieczną
2) walec poprzeczny styczny
3) walec poprzeczny sieczny
4) stożek sieczny
34
Państwowy układ współrzędnych geodezyjnych „PL LCC" jest Lamberta odwzorowaniem równokątnym :
1) stozkowym siecznym
2) walcowym stycznym
3) azymutalnym ukosne
4) walcowym siecznym
35
Państwowy układ współrzędnych geodezyjnych „PL LAECC" jest odwzorowaniem
Lamberta równopolowym:
1) stozkowym siecznym
2) walcowym stycznym
3) azymutalnym ukośnym
4) walcowym siecznym
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 7 z 10

Kartografia
Egzamin dyplomowy inżynierski
36
UTM jest układem współrzędnych prostokątnych płaskich, związanym z odwzorowaniem:
1) normalnym Mercatora,
2) poprzecznym Mercatora,
3) quasi-stereograficznym,
4) stożkowym normalnym.
37
Międzynarodowa mapa świata jest w skali:
1) 1: 10 000 000
2) 1: 1 000 000
3) 1: 2 000 000
4) 1: 500 000
38
Mapa to zmniejszony obraz ciała niebieskiego na:
1) geoidzie,
2) elipsoidzie,
3) płaszczyźnie,
4) kuli.
39
Elementem osnowy matematycznej mapy jest:
1) skala,
2) punkt widokowy,
3) izolinia,
4) współrzędne: B, L ,H.
40
Elementami osnowy matematycznej mapy są:
1) skala i podziałka,
2) zboczenia i deklinacje,
3) współrzędne: B, L ,H,
4) punkty widokowe .
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 8 z 10


Kartografia
Egzamin dyplomowy inżynierski
41
Mapy ogólnogeograficzne to:
1) mapy glebowe,
2) mapy topograficzne,
3) mapy hydrograficzne,
4) mapy geologiczne.
42
Która z wymienionych map jest mapą tematyczną:
1) mapa topograficzna,
2) mapa sytuacyjno-wysokościowa,
3) mapa hydrograficzna,
4) mapa zasadnicza.
43
W Polsce, mapy wielkoskalowe należą do przedziału skalowego:
1) 1:10 000 - 1:100 000
2) 1:500 - 1: 5 000
3) 1:200 000 - 1 000 000
4) 1: 2 000 000 - 1: 30 mil.
44
Z ilu warstw informatycznych składa się mapa cyfrowa:
1) jednej,
2) pięciu,
3) dowolnej skończonej liczby,
4) nieskończonej liczby.
45
Cyfrowa generalizacja kartograficzna zależy:
1) od uogólnienia obiektów w modelu DCM,
2) od uogólnienia obiektów w modelu DLM,
3) tylko od zmiany skali,
4) tylko od zmiany treści.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 9 z 10


Kartografia
Egzamin dyplomowy inżynierski
46
Prawo Töpfera-Pillewizera stosowne w generalizacji kartograficznej wykorzystywane jest do:
1) zasad wyboru,
2) eliminacji obiektów,
3) klasyfikacji obiektów,
4) upraszczania kształtu.
47
Który z algorytmów upraszczania kształtu obiektów jest algorytmem globalnym:
1) Jensa,
2) Witkamma ,
3) Douglasa,
4) Riemmana.
48
Do metod jakościowych przedstawień kartograficznych zalicza się metodę:
1) izolinii,
2) kropkową,
3) sygnaturową,
4) kartodiagramów.
49
Do metod ilościowych przedstawień kartograficznych zalicza się metodę:
1) izolinii,
2) zasięgów,
3) chorochromatyczną,
4) kartodiagramów.
50
Aktualizację ciągłą stosuje się na mapie:
1) zasadniczej,
2) topograficznej,
3) hydrograficznej,
4) sozologicznej.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 10 z 10

Kataster i gospodarka nieruchomościami
Egzamin dyplomowy inżynierski
W ewidencji gruntów rejestruje się:
1) wartość działki ewidencyjnej i datę jej określenia
2) wartość hipoteki i datę jej określenia
3) przeznaczenie działki ewidencyjnej
4) współrzędne środka ciężkości działki ewidencyjnej
1
Do atrybutów działki ewidencyjnej nie należy:
1) powierzchnia użytków
2) numer rejonu statystycznego
3) oznaczenie przeznaczenia gruntów w planie miejscowym
4) numer rejestru zabytków
2
Do atrybutów budynku nie należy:
1) Numer porządkowy budynku
2) Kąt pochylenia połaci dachowych
3) Liczba kondygnacji podziemnych
4) Rok zakończenia budowy
3
Do atrybutów lokalu nie należy:
1) Powierzchnia pomieszczeń przynależnych
2) Powierzchnia pomieszczeń pomocniczych
3) Powierzchnia użytkowa lokalu
4) Liczba izb wchodzących w skład lokalu
4
Ewidencję gruntów i budynków prowadzi:
1) Wójt gminy jeżeli zawarł umowę z wojewoda w zakresie prowadzenia ewidencji gruntow na obszarze
gminy
2) Starosta powiatu
3) Wojewoda
4) Marszalek województwa
5
Operat ewidencyjny składa się z:
1) części opisowej i części kartograficznej
2) części opisowo-kartograficznej i części prawnej
3) części opisowej i części geodezyjnej
4) części opisowo-kartograficznej i części geodezyjno-prawnej
6
Zasada rękojmi wiary publicznej ksiąg wieczystych:
1) nie dotyczy praw rzeczowych
2) nie dotyczy oznaczenia nieruchomości
3) dotyczy wartości nieruchomości
4) dotyczy hipoteki
7
Nieruchomość gruntowa to:
1) część powierzchni ziemskiej stanowiąca przedmiot odrębnej własności
2) ciągła część powierzchni ziemskiej otoczona gruntami stanowiącymi przedmiot odrębnego władania
3) ciągła część powierzchni ziemskiej jednolita pod względem prawnym
4) część powierzchni ziemskiej jednolita ze względu na władanie
8
Według obowiązujących przepisów jednostką rejestrową gruntów są:
1) grunty położone w granicach jednostki ewidencyjnej
2) grunty stanowiące obręb
3) działki w granicach obrębu tworzące jedną nieruchomość
4) działki w granicach obrębu jednolite pod względem władania
9
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 6
Kataster i gospodarka nieruchomościami
Egzamin dyplomowy inżynierski
Do gruntów rolnych nie należą:
1) grunty orne oznaczone literą R
2) rowy oznaczone literą W
3) grunty pod stawami oznaczone literami Wsr
4) grunty zadrzewione i zakrzewione oznaczone literami Lz
10
Oznaczenie użytku „Ti” oznacza:
1) tereny przeznaczone pod infrastrukturę przemysłową
2) tereny komunikacyjne inne
3) tereny inne
4) nie ma takiego użytku
11
Która z poniższych klas nie jest klasą użytku łąki trwałe:
1) IV
2) VI
3) IIIb
4) II
12
Klasyfikacji gleboznawczej podlegają:
1) Lasy
2) Grunty pod wodami powierzchniowymi płynącymi
3) Tereny rekreacyjno-wypoczynkowe
4) Tereny różne
13
Oznaczenie użytku „B” oznacza:
1) tereny mieszkaniowe
2) tereny budowlane
3) bory
4) tereny bagienne
14
W dziale II ksiąg wieczystych ujawnia się:
1) oznaczenie nieruchomości
2) prawa rzeczowe
3) użytkowanie
4) hipotekę
15
W ewidencji gruntów i budynków ujawnia się wszystkie budynki:
1) trwale związane z gruntem,
2) posiadające fundamenty i dach
3) wymagające pozwolenia na budowę lub zgłoszenia budowy,
4) trwale związane z gruntem, wyodrębnione z otoczenia ścianami, posiadające fundamenty i dach
16
Mapa ewidencyjna nie zawiera:
1) granic użytków,
2) nazw ulic
3) linii zabudowy
4) numerów dróg publicznych
17
Działka ewidencyjna o numerze 120 uległa podziałowi na dwie działki. Nowe działki otrzymają numery:
1) 120a, 120b
2) 120-1, 120-2
3) 120, 121
4) 120/1, 120/2
18
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 6
Kataster i gospodarka nieruchomościami
Egzamin dyplomowy inżynierski
Z odrębną własnością lokalu związane jest prawo:
1) współwłasności w części gruntu na którym jest budynek w którym jest lokal
2) użytkowania wieczystego części wspólnych budynku w którym jest lokal
3) trwałego zarządu pomieszczeniami przynależnymi do lokalu
4) żadne z powyższych
19
Rejestr gruntów jest:
1) raportem o wszystkich działkach ewidencyjnych w granicach jednostki ewidencyjnej
2) raportem o wszystkich działkach ewidencyjnych w granicach obrębu, zebranych według ich
przynależności do poszczególnych jednostek rejestrowych
3) raportem o wszystkich działkach ewidencyjnych w granicach obrębu, zebranych według numerów tych
działek
4) raportem o wszystkich gruntach w granicach gminy
20
Rejestr budynków zawiera dane o:
1) wszystkich budynkach w granicach jednostki ewidencyjnej
2) wszystkich budynkach mieszkalnych w granicach obrębu
3) wszystkich budynkach stanowiących odrębne nieruchomości w granicach obrębu
4) wszystkich budynkach w granicach obrębu
21
Celem publicznym według ustawy o gospodarce nieruchomościami nie jest:
1) budowa i utrzymywanie prywatnych przedszkoli
2) budowa i utrzymywanie publicznych obiektów sportowych
3) budowa i utrzymywanie ciągów drenażowych
4) budowa i utrzymywanie pomieszczeń dla sądów
22
Użytkowanie wieczyste może być ustalone na okres:
1) co najmniej 30 lat
2) co najmniej 40 lat
3) nie więcej niż na 100 lat
4) dożywotnio
23
Ustawa o gospodarce nieruchomościami określa zasady:
1) gospodarowania nieruchomościami rolnymi stanowiącymi własność Skarbu Państwa
2) gospodarowania nieruchomościami stanowiącymi własność Skarbu Państwa oraz własność jednostek
samorządu terytorialnego
3) gospodarowania nieruchomościami rolnymi i leśnymi stanowiącymi własność Skarbu Państwa
4) gospodarowania nieruchomościami innymi niż rolne i leśne stanowiącymi własność Skarbu Państwa
24
Oddanie w użytkowanie wieczyste nieruchomości gruntowej wymaga:
1) umowy ustnej
2) decyzji administracyjnej
3) postanowienia wójta
4) umowy w formie aktu notarialnego
25
Do wniosku o podział nieruchomości w trybie ustawy o gospodarce nieruchomościami dołączane jest
między innymi:
1) szkic polowy z pomiaru granic zewnętrznych
2) obliczenie pól powierzchni nowych działek
3) wykaz zmian gruntowych
4) sprawozdanie techniczne
26
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 6
Kataster i gospodarka nieruchomościami
Egzamin dyplomowy inżynierski
Opłata adiacencka to:
1) opłata ustalona w związku ze wzrostem wartości nieruchomości spowodowanym między innymi
scaleniem i podziałem nieruchomości
2) opłata ustalona w związku ze wzrostem wartości nieruchomości spowodowanym jej rozgraniczeniem
3) opłata ustalona w związku ze przekazaniem gruntów w użytkowanie wieczyste
4) opłata ustalona w związku ze wzrostem wartości nieruchomości spowodowanym uchwaleniem planu
miejscowego gminy
27
Wywłaszczenie jest możliwe:
1) na cele publiczne za odszkodowaniem ustalonym przez właściciela nieruchomości wywłaszczanej
2) na cele publiczne za słusznym odszkodowaniem
3) za słusznym odszkodowaniem
4) gdy wymaga tego ważny interes społeczny
28
Wywłaszczoną nieruchomość uznaje się za zbędną na cel określony w decyzji o wywłaszczeniu, jeżeli:
1) pomimo upływu 10 lat od dnia, w którym decyzja o wywłaszczeniu stała się ostateczna, nie rozpoczęto
prac związanych z realizacją tego celu
2) pomimo upływu 7 lat od dnia, w którym decyzja o wywłaszczeniu stała się ostateczna, nie zakończono
prac związanych z realizacją tego celu
3) pomimo upływu 7 lat od dnia, w którym decyzja o wywłaszczeniu stała się ostateczna, nie rozpoczęto
prac związanych z realizacją tego celu
4) pomimo upływu 5 lat od dnia, w którym decyzja o wywłaszczeniu stała się ostateczna, nie rozpoczęto
prac związanych z realizacją tego celu
29
Scalenie i podział nieruchomości jest możliwe jeżeli:
1) wystąpią o nie właściciele lub użytkownicy wieczyści ponad 50 % powierzchni gruntów objętych
scaleniem i podziałem
2) wyrazi na to zgodę wójt gminy
3) jest to zgodne z studium uwarunkowań i kierunków zagospodarowania przestrzennego gminy
4) gdy wyrazi na to zgodę wojewoda
30
Działalność zawodową rzeczoznawcy majątkowego, pośrednika i zarządcy nieruchomości reguluje:
1) Ustawa Prawo Geodezyjne i Kartograficzne
2) Ustawa Prawo Budowlane
3) Ustawa o Gospodarce Nieruchomościami
4) Kodeks Cywilny
31
Wartość rynkową stanowi:
1) koszt odtworzenia
2) prawdopodobna cena transakcyjna
3) koszt odtworzenia z uwzględnieniem zużycia
4) wartość katastralna
32
Wartość odtworzeniową stanowi:
1) koszt odtworzenia
2) cena transakcyjna
3) koszt odtworzenia z uwzględnieniem zużycia
4) wartość katastralna
33
Wartość katastralna to:
1) wartość wyznaczona w procesie powszechnej taksacji
2) wartość rynkowa
3) wartość indywidualna
4) wartość wyznaczona w podejściu kosztowym
34
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 6
Kataster i gospodarka nieruchomościami
Egzamin dyplomowy inżynierski
Podejście porównawcze szacowania nieruchomości bazuje między innymi na:
1) cenach nieruchomości podobnych
2) czynszach nieruchomości podobnych
3) kosztach zastąpienia nieruchomości
4) dochodach z nieruchomości podobnych
35
Podejście dochodowe szacowania nieruchomości bazuje między innymi na:
1) cenach transakcyjnych i cechach cenotwórczych
2) kosztach robocizny i materiałów budowlanych
3) czynszach z tytułu najmu lub dzierżawy
4) zyskach ze sprzedaży materiałów porozbiórkowych
36
W podejściu kosztowym wyznaczamy:
1) wartość rynkową
2) wartość odtworzeniową
3) wartość katastralną
4) wartość kosztową
37
Zużycie nieruchomości uwzględniamy wyznaczając wartość odtworzeniową:
1) tylko w metodzie porównywania parami
2) we wszystkich metodach podejścia dochodowego
3) we wszystkich metodach podejścia kosztowego
4) tylko w technice szczegółowej
38
Operat szacunkowy stanowi opinię o:
1) bezpieczeństwie użytkowania budynku
2) wartości nieruchomości
3) możliwym sposobie zagospodarowania
4) możliwości zabudowy gruntu
39
Zawód rzeczoznawcy majątkowego może wykonywać:
1) każdy obywatel państwa
2) osoba posiadająca stosowną licencję
3) geodeta
4) notariusz
40
Do uzyskania licencji zawodowej rzeczoznawcy konieczne jest:
1) ukończenie studiów prawniczych
2) ukończenie praktyki zawodowej
3) posiadanie uprawnień geodezyjnych 1 i 2
4) 2 letnia działalność w zawodzie
41
Pośrednik w obrocie nieruchomościami to:
1) zawód regulowany ustawą o gospodarce nieruchomościami
2) zawód możliwy do wykonywania bez uprawnień
3) jedno z uprawnień geodety
4) aplikacja prawnicza
42
Umowa pośrednictwa może być zawarta w formie:
1) z wyłącznością lub bez niej
2) tylko jako umowa pośrednictwa otwarta
3) tylko w wyłącznością
4) wyłącznie w postaci aktu notarialnego
43
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 6
Kataster i gospodarka nieruchomościami
Egzamin dyplomowy inżynierski
Umowa pośrednictwa otwarta:
1) nie pozwala na zawarcie innych umów pośrednictwa dotyczących tej samej nieruchomości
2) pozwala na zawarcie innych umów pośrednictwa dotyczących tej samej nieruchomości
3) nie pozwala na zawarcie umów pośrednictwa dotyczących innej nieruchomości
4) występuje wyłącznie w postaci aktu notarialnego
44
Umowa pośrednictwa z wyłącznością:
1) nie pozwala na sprzedaż nieruchomości przez innego pośrednika
2) pozwala na zawieranie dowolnej liczby umów z innymi pośrednikami
3) pozwala na zawarcie umowy z dodatkowym pośrednikiem
4) obliguje sprzedającego do reklamowania swojej oferty
45
Wykonywanie zawodu zarządcy nieruchomości wymaga:
1) posiadania licencji
2) pracy w spółdzielni mieszkaniowej
3) członkostwa w spółdzielni mieszkaniowej
4) bycia jednym ze współwłaścicieli zarządzanej nieruchomości
46
Przyjęcie spadku z dobrodziejstwem inwentarza:
1) zabezpiecza przed przejęciem zobowiązań zmarłego
2) wskazuje na odpowiedzialność tylko do wielkości spadku
3) wskazuje na konieczność przejęcia zwierząt gospodarskich
4) odpowiada się całym majątkiem własnym i uzyskanym ze spadku
47
Proste przejęcie spadku powoduje, że za długi spadkodawcy:
1) odpowiada się całym majątkiem własnym i uzyskanym ze spadku
2) odpowiada się tylko majątkiem uzyskanym ze spadku
3) wyłącza odpowiedzialność za te długi
4) odpowiada się za 50% zobowiązań
48
Zachowek to:
1) należny najbliższym udział w masie spadkowej
2) rodzaj zabezpieczenia kredytu
3) część spadku przypadająca małżonkowi
4) 50% spadku
49
Testament może zostać napisany:
1) w postaci aktu notarialnego
2) tylko odręcznie
3) wspólnie z innymi osobami
4) tylko pismem maszynowym
50
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 6
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
1
Który zapis macierzowy jest poprawny:
1)
k
m
k
m
n
m
,
,
,
C
B
A
2)
k
m
k
n
n
m
,
,
,
C
B
A
3)
n
m
n
k
n
m
,
,
,
C
B
A
4)
n
m
n
m
n
m
,
,
,
C
B
A
2
Jak definiuje się algebraiczne dopełnienie
j
i,
A elementu
j
i
a
,
macierzy A :
1)
j
i
j
i
,
,
M
A
j
i
j
i
a
,
,
elementu
minor
M
2)
j
i
j
i
a
,
,
det A
A
3)
j
i
j
i
j
i
,
,
1
M
A
4)
j
i
j
i
j
i
a
,
,
,
M
A
3
Jak definiuje się, defekt macierzy
n
m,
A :
1)
m
R
d
A
2)
n
R
d
A
3)
A
R
n
d
4)
A
R
m
n
d
,
min
4
Jaki warunek musi spełniać macierz ortogonalna?
1)
E
A
A
AA
T
T
E – macierz jednostkowa
2)
E
AA
T
E – macierz jednostkowa
3)
D
A
A
AA
T
T
D – macierz diagonalna
4)
D
AA
T
D – macierz diagonalna
5
Z jakiego zakresu wartości przyjmują współczynniki koreacji Pearsona?
1) -1 do 1
2) powyżej 0
3) 0 do 1
4) powyżej 1
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 10
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
6
Współczynnik determinacji może przyjąć wartość:
1) -1 do 1
2) powyżej 0
3) 0 do 1
4) powyżej 1
7
Ile wynosi defekt iloczynu dwóch macierzy kwadratowych, z których każda obarczona
jest znanym defektem?
1) jest równy sumie defektów obydwu macierzy
2) jest równy różnicy defektów obydwu macierzy
3) wynosi co najmniej tyle, ile większy z obydwu defektów
4) wynosi co najwyżej tyle, ile mniejszy z obydwu defektów
8
Zakładając, że istnieje jednoznaczny rozkład macierzy A na czynniki trójkątne
G
H
A
T
, można
wyznaczyć odwrotność macierzy A według zależności:
1)
1
1
T
1
G
H
A
2)
1
T
1
1
H
G
A
3)
1
T
1
H
G
A
4)
1
T
1
G
H
A
9
Jaki warunek muszą spełniać zdarzenia niezależne?
1)
A
B
P
A
P
B
A
P
\
2)
B
A
P
B
P
B
A
P
\
3)
B
P
A
P
B
A
P
4)
B
A
P
B
P
A
P
B
A
P
10
Jakim estymatorem jest średnia arytmetyczna?
1) obciążonym i zgodnym
2) nieobciążonym i efektywnym
3) nieefektywnym lecz zgodnym
4) obciążonym lecz dostatecznym
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 10
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
11
Która z charakterystyk liczbowych jednowymiarowej zmiennej losowej jest miarą
rozrzutu jej wartości?
1) wartość przeciętna
X
E
2) wariancja
X
V
3) współczynnik asymetrii
4) współczynnik skupienia
12
Funkcja gęstości rozkładu normalnego posiada maksimum dla:
1)
x
2)
x
3)
2
x
4)
2
x
13
Wartość przeciętna zmiennej losowej
X
z zaobserwowanej próby wynosi:
1)
1
E
1
n
x
X
n
i
i
2)
n
x
X
n
i
i
1
E
3)
1
E
1
n
n
x
X
n
i
i
14
Zmienna losowa
X
ma rozkład
,
N
przy czym
i
są nieznane.
Przedział ufności dla wartości przeciętnej jest określany:
1) z rozkładu normalnego
2) z rozkładu Studenta
3) z rozkładu chi-kwadrat
4) z rozkładu dwumianowego
15
Zmienna losowa
X
ma rozkład
,
N
przy czym
jest znane. Ile wynosi prawdopodobieństwo,
że zmienna losowa znajdzie się w przedziale
2
E
;
2
E
X
X
:
1) 0.68
2) 0.75
3) 0.95
4) 0.98
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 10
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
16
Jaki jest wzór na odchylenie standardowe średniej arytmetycznej rozkładu z próby o n elementach:
1)
1
ˆ
n
X
n
2)
n
X
n
ˆ
3)
n
X
n
ˆ
4)
1
ˆ
n
X
n
17
Jaki jest wzór na odchylenie standardowe wariancji rozkładu z próby o n elementach:
1)
2
1
1
ˆ
V
n
n
X
2)
2
1
2
ˆ
V
n
n
X
3)
2
1
ˆ
V
n
n
X
4)
n
n
X
1
1
ˆ
V
18
Jaki parametr zmiennej losowe definiuje moment absolutny 1 rzędu?
1) odchylenie standardowe
2) wartość przeciętną
3) medianę
4) gęstość prawdopodobieństwa
19
Przyrost dystrybuanty rozkładu normalnego w przedziale ±σ wynosi:
1) 0.50
2) 0.68
3) 0.85
4) 0.95
20
Ile wynosi wartość przeciętna rozkładu chi-kwadrat o k stopniach swobody?
1)
1
k
2) k
3)
k
2
4)
2
k
k
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 10
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
21
Ile wynosi wariancja rozkładu t-Studenta o k stopniach swobody?
1) k
2)
k
2
3)
1
k
k
4)
2
k
k
22
Jak definiuje się kowariancję dwóch zmiennych losowych?
1)
Y
Y
X
X
Y
X
E
E
E
,
cov
2)
2
2
E
E
,
cov
Y
X
Y
X
3)
Y
X
Y
X
Y
X
E
E
,
E
,
cov
4)
2
,
E
,
cov
Y
X
Y
X
23
Macierz wariancyjno-kowariancyjną dla zmiennej dwuwymiarowej definiuje się za pomocą:
1) momentów zwykłych l-ego rzędu
2) momentów centralnych 1 -ego rzędu
3) momentów centralnych 2-ego rzędu
4) momentów zwykłych 2-ego rzędu
24
Jaką wartość przyjmuje współczynnik korelacji r dla macierzy
4
1
1
2
Y
X,
Cov
:
1)
4
1
2)
2
1
3)
8
1
4) 7
25
Dla rozkładu wariancji z próby zmiennej losowej
X
estymator nieobciążony definiuje się wzorem:
1)
n
i
i
X
X
n
1
2
2
E
1
2)
n
i
i
X
X
n
1
2
2
E
1
1
3)
n
i
i
X
X
1
2
2
E
4)
n
i
i
X
X
n
1
2
2
E
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 10
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
26
Wagę zmiennej losowej
X
definiuje się wzorem:
1)
2
i
i
p
2)
i
i
p
1
3)
2
1
i
i
p
4)
i
i
p
27
Jaka jest postać równania obserwacji dla przewyższenia
h
?
1)
h
dz
dz
h
1
2
2)
2
1
1
2
z
dz
dz
h
3)
2
1
1
2
z
h
dz
dz
h
4)
2
1
1
2
z
h
dz
dz
h
28
Jaka jest postać równania obserwacji dla poziomej odległości między stałym punktem
P
a wyznaczanym punktem
K
:
1)
PK
K
PK
PK
K
PK
PK
d
d
dy
d
Y
dx
d
X
2)
PK
K
PK
PK
K
PK
PK
d
d
dy
d
X
dx
d
Y
3)
2
2
PK
PK
PK
K
PK
PK
K
PK
PK
d
Y
X
d
dy
d
Y
dx
d
X
4)
2
2
PK
PK
PK
K
PK
PK
K
PK
PK
d
Y
X
d
dy
d
X
dx
d
Y
29
W sieci płaskiej, nawiązanej do 3 punktów stałych i bezbłędnych pomierzono 12 kątów
oraz 10 długości w celu wyznaczenia współrzędnych (X,Y) 5 punktów nowo wyznaczanych.
Liczba stopni swobody w tej sieci wynosi:
1) 22
2) 6
3) 12
4) 16
30
W sieci płaskiej, nawiązanej do 3 punktów o znanej macierzy wariancyjno-kowariancyjnej
pomierzono 12 kątów oraz 10 długości w celu wyznaczenia współrzędnych (X,Y) 5 punktów
nowo wyznaczanych. Liczba stopni swobody w tej sieci wynosi:
1) 22
2) 6
3) 12
4) 16
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 10
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
31
Promień hiperkuli błędów można wyznaczyć na podstawie:
1) wariancji zmiennych losowych
2) wyznacznika macierzy wariancyjno-kowariancyjnej
3) śladu macierzy wariancyjno-kowariancyjnej
4) równań obserwacyjnych dla kątów i długości
32
W przypadku wyrównania sieci kątowo-liniowej metodą pośredniczącą, współczynniki w macierzy
PA
A
T
mogą być wyrażone w jednostkach:
1) [ cc ] / [ m ]
2) [ m ] / [ cc ]
3) 1 / [ m
2
]
4) są bezwymiarowe
33
W przypadku wyrównania sieci wysokościowej metodą pośredniczącą,
współczynniki w macierzy
PA
A
T
mogą być wyrażone w jednostkach:
1) [ m ]
2) [ m ] * [ m ]
3) [ mm ]
4) bezwymiarowe
34
Współczynniki równań obserwacyjnych dla długości mogą być wyrażone są w jednostkach:
1) [ mm ]
2) [ mm ] / [ cc ]
3) [ cc ] / [ mm ]
4) są bezwymiarowe
35
Współczynniki równań obserwacyjnych dla kątów wyrażone są w jednostkach:
1) [ cc ]
2) [ cc ] / [ mm]
3) [ mm ] / [ cc ]
4) są bezwymiarowe
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 7 z 10
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
36
Jaki związek mają wartości własne macierzy z defektem tej macierzy?
1) defekt macierzy jest równy liczbie wartości własnych
2) defekt macierzy jest równy liczbie wartości własnych wynoszących zero
3) defekt macierzy jest równy liczbie wartości własnych większych od zera
4) defekt macierzy wynosi tyle, ile najmniejsza wartość własna
37
Przedział ufności dla wariancji zmiennej losowej X o rozkładzie
,
N
, o nieznanych
i
i próbie
20
n
definiowany jest za pomocą rozkładu:
1) normalnego
2) Studenta
3) chi-kwadrat
4) Fishera
38
W jakim przypadku macierz G w modelu parametrycznym
G
AX
L
2
,
,
będzie macierzą jednostkową:
1) gdy obserwacje są jednego rodzaju
2) gdy pomiary są wykonywane z jednakową dokładnością
3) gdy obserwacje są niezależne
4) gdy obserwacje są niezależne i są wykonane z jednakową dokładnością
39
Dla modelu
G
AX
L
2
,
,
estymator wariancji resztowej ma postać:
1)
k
n
L
P
A
X
L
P
L
1
T
1
T
2
ˆ
ˆ
2)
k
n
L
AP
X
L
LP
1
T
1
2
ˆ
ˆ
3)
k
n
PL
A
X
PL
L
T
T
2
ˆ
ˆ
4)
k
n
L
AP
L
LP
1
T
1
2
ˆ
40
Kryterium MNK dla modelu
G
AX
L
2
,
,
ma postać:
1)
min
1
T
AX
L
P
AX
L
2)
min
T
AX
L
P
AX
L
3)
min
T
AX
L
AX
L
4)
min
2
AX
L
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 8 z 10
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
41
Wartość kwantyla zmiennej losowej o rozkładzie normalnym zależy od:
1) liczby obserwacji
2) liczby stopni swobody
3) poziomu ufności
4) gęstości prawdopodobieństwa
42
Wartości własne dla macierzy
5
6
3
2
Y)
Cov(X,
wynoszą:
1)
7
1
2
1
2)
8
1
2
1
3)
5
2
2
1
4)
6
3
2
1
43
Macierz wariancyjno-kowariancyjną, dla obserwacji uzgodnionych metodą spostrzeżeń pośredniczących,
wyznacza się ze wzoru:
1)
A
PA)
(A
A
)
L
Cov(
1
T
T
2
o
σˆ
ˆ
2)
T
2
o
σˆ
ˆ
A
PA)
(A
A
)
L
Cov(
1
T
3)
T
2
σˆ
ˆ
A
PA)
(A
A
)
L
Cov(
1
T
i
4)
A
PA)
(A
A
)
L
Cov(
1
T
T
2
i
σˆ
ˆ
44
W wyniku uzgodnienia obserwacji w sieci niwelacyjnej składającej się z 7 reperów wyznaczanych
i 2 stałych reperów nawiązania, obliczono sumę
120
V
V
T
. Ile wynosi odchylenie standardowe
na jedno stanowisko niwelatora, jeżeli wiadomo, że w sieci pomierzono 15 przewyższeń,
przy czym każde z 3 stanowisk niwelatora, a macierz wagowa jest macierzą jednostkową.
1)
120
2)
15
3
3)
15
4)
5
45
Czy prawdą jest, że błąd standardowy szacunku jest statystyką (zmienną losową)?
1) Tak
2) Tak, pod warunkiem, że próba jest duża
3) Tak, pod warunkiem, że jest nieobciążony
4) Nie
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 9 z 10
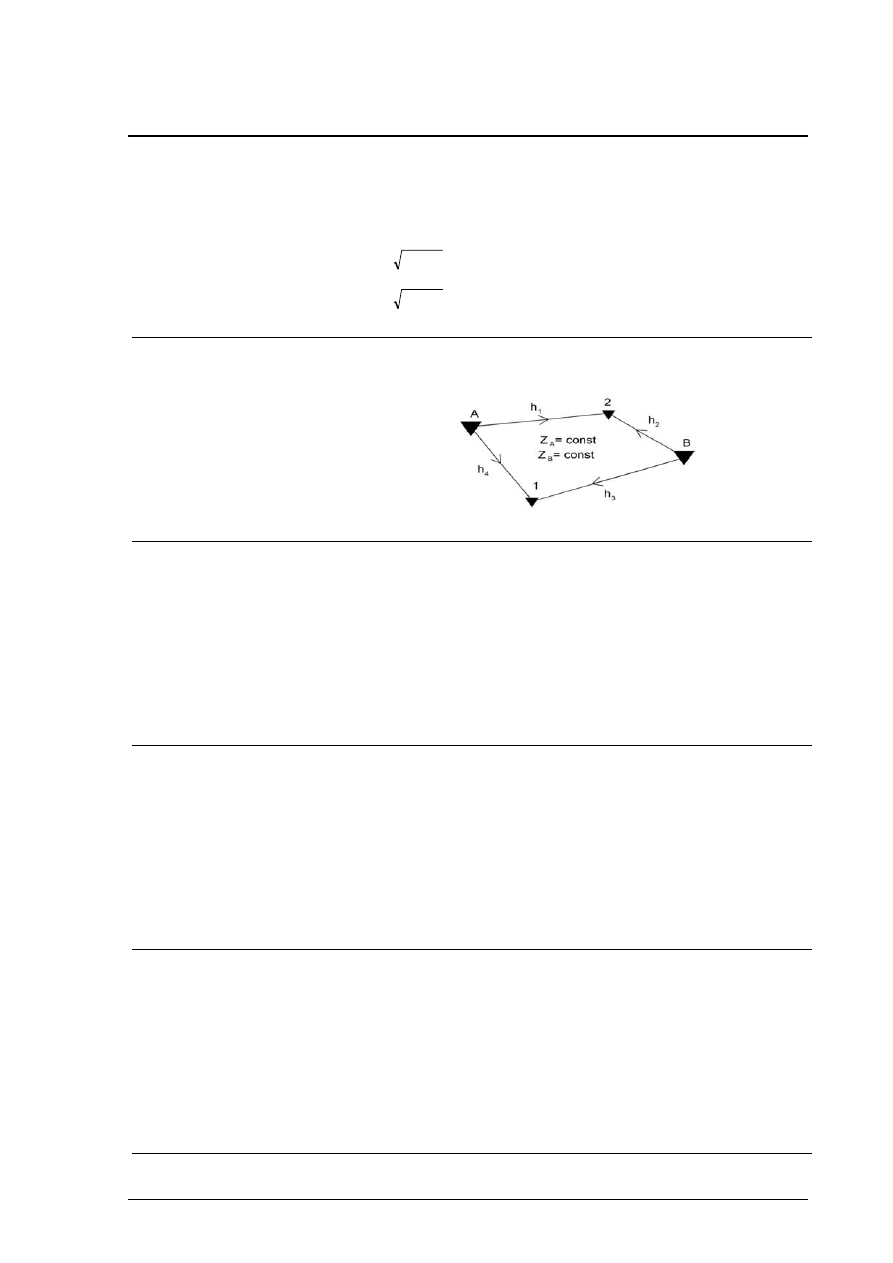
Rachunek wyrównawczy i elementy statystyki
Egzamin dyplomowy inżynierski
46
Dwie niezależne zmienne losowe
Y
,
X
mają rozkłady normalne odpowiednio N(10,8) oraz N(6,6).
Jaki rozkład ma różnica
Y
,
X
?
1) t-Studenta o parametrach
4
,
68
.
0
1
2) Normalny o parametrach
2
2
6
8
,
6
10
N
3) Normalny o parametrach
2
2
6
8
,
6
10
N
4) Normalny o parametrach
2
2
6
8
,
6
10
N
47
Ile maksymalnie równań warunkowych można zapisać dla sieci niwelacyjnej przedstawionej na rysunku
(repery 1, 2 – wyznaczane):
1) 4 z czego 3 są niezależne
2) 4 z czego 2 są niezależne
3) 3 z czego 2 są niezależne
4) 1 warunek
48
Wariancja
V a X
(
)
, jeżeli a jest stałą, X-zmienna losową, wynosi:
1)
)
( X
V
a
2)
)
( X
V
3)
)
(
2
X
V
a
4)
a
X
V
/
)
(
49
Wymiar (jednostka) współczynnika korelacji zależy od:
1) Jednostki analizowanych zmiennych losowych
2) Może być dowolnie ustalana – w zależności od potrzeb
3) Przyjętego poziomu prawdopodobieństwa
4) Współczynnik korelacji jest bezwymiarowy
50
Korelacje cząstkowe wyznacza się:
1) W celu wyeliminowania wpływu pozostałych zmiennych na analizowaną
2) Dla zmiennych które zależne są nieliniowo
3) Pomiędzy dwoma wybranymi zmiennymi z pośród wszystkich zmiennych zależnych liniowo
4) Pomiędzy dwoma wybranymi zmiennymi z pośród wszystkich zmiennych zależnych nieliniowo
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 10 z 10
Systemy informacji o terenie
Egzamin dyplomowy inżynierski
1
Jedną z cech mapy w postaci tradycyjnej jest:
1) pełnienie funkcji środka przechowywania informacji i środka prezentacji informacji
2) pełnienie funkcji środka przechowywania informacji o niezmiennych parametrach kartometrycznych
3) duża pojemność informacyjna obrazu mapy i możliwość zamieszczania opisów
4) łatwość wykonywania selekcji i aktualizacji obrazu mapy
2
Jedną z podstawowych wad mapy w postaci tradycyjnej jest:
1) brak poglądowości obrazu mapy
2) sposób rzutowania odmienny od codziennego widzenia przestrzeni realnej
3) zależność parametrów kartometrycznych obrazu mapy od temperatury i wilgotności
4) brak ustalonych uniwersalnych znaków umownych
3
Stan przestrzeni realnej odwzorowywany w postaci mapy podlega redukcjom:
1) redukcji nadmiarowości (redundancji) i redukcja skali
2) redukcji liczby szczegółów terenowych powiązanej z opisem zredukowanych obiektów na mapie
3) redukcji obiektów terenowych proporcjonalnej pod względem tematycznym klas
4) redukcji przestrzeni, redukcji klas i redukcji kształtu
4
Dla zapisu realnej przestrzeni w postaci komputerowej:
1) niezbędny jest podział przestrzeni na elementarne komórki i analiza ich zawartości
2) niezbędna jest redukcja realnej przestrzeni trójwymiarowej do dwóch wymiarów, a następnie
doprowadzenie do postaci jednowymiarowej (do sekwencji znaków)
3) niezbędna jest bezpośrednia analiza w realnej przestrzeni trójwymiarowej
4) niezbędne jest wyróżnienie obiektów w przestrzeni trójwymiarowej i ich redukcja do jednego wymiaru
5
Wspólną cechą systemu informacji o terenie i systemu informacji geograficznej jest:
1) identyczne środowisko skalowe
2) identyczność typowych modeli
3) przynależność do klasy systemów informacji przestrzennej
4) w przybliżeniu równa wielkość obiektów elementarnych i ich dokładność
6
Zgodnie z cybernetyczną interpretacją pojęcia „informacja", informację można określić jako:
1) jednorazowe przekazanie wiadomości nie pozostającej w relacji z innymi wiadomościami
2) pojawienie się zdarzenia ze zbioru możliwych zdarzeń
3) nośnik wiadomości o zabarwieniu semantycznym
4) budowanie nowych wartości w oparciu o doświadczenie
7
Tablica jako struktura danych:
1) jest uporządkowanym zbiorem elementów tego samego typu
2) jest uporządkowanym zbiorem elementów różnych typów
3) jest uporządkowanym zbiorem elementów liczbowych i literowych
4) jest zbiorem wyłącznie danych liczbowych
8
Rekord jako struktura danych:
1) jest zbiorem elementów, które mogą być różnych typów a kolejność tych elementów jest dowolna
2) jest zbiorem elementów tego samego typu
3) jest zbiorem elementów, które mogą być różnych typów a kolejność tych elementów jest ustalona
4) jest zapisem elementarnym w tablicy
9
Stos jest strukturą danych o następujących cechach:
1) jest strukturą przestrzenną
2) jest strukturą liniową o dostępie dwustronnym
3) jest strukturą liniową, do której jest dostęp tylko z jednej strony
4) jest uporządkowanym zbiorem, w którym kolejność elementów określają wskaźniki
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 7
Systemy informacji o terenie
Egzamin dyplomowy inżynierski
10
Drzewo jest strukturą:
1) reprezentującą cykliczną sieć elementów
2) ustanawiającą hierarchię elementów
3) sieciową, połączoną węzłami
4) równoważnych elementów
11
Model wektorowy polega na:
1) wyróżnianiu obiektów, analizowaniu ich w pewnej kolejności oraz rozkładaniu obiektów na elementy
strukturalne
2) zamianie obiektów krzywoliniowych na wektory
3) zamianie wielolinii na wektory elementarne
4) przypisywaniu krawędziom obiektów wektorów jednostkowych
12
Jedną z cech modelu wektorowego, obiektowego nietopologicznego jest:
1) oszczędność zapisu obrazu mapy
2) uwzględnienie cech topologicznych tylko w stosunku do obiektów punktowych
3) duża redundancja (nadmiarowość) zapisu
4) jednoznaczność granic obiektów w przypadku dokonywania zmian
13
Typowym zastosowaniem modelu obiektowego nietopologicznego jest:
1) zastosowanie do wykonywania analiz przestrzennych
2) zastosowanie do zadań uwzględniających relacje przestrzenne pomiędzy obiektami
3) zastosowanie do zadań, gdzie wymagany jest zapis uniwersalny
4) zastosowanie jedynie w zadaniach nie wymagających analiz przestrzennych
14
Topologia obrazu mapy polega na:
1) budowaniu związków pomiędzy geometrią i opisem obrazu mapy
2) budowaniu związków pomiędzy powierzchnią topograficzną i obiektami zlokalizowanymi na tej
powierzchni
3) budowaniu obrazu map topograficznych na podstawie map wielkoskalowych
4) wyróżnianiu elementów strukturalnych i obiektów w obrazie mapy i uwzględnieniu relacji
przestrzennych pomiędzy elementami i obiektami
15
Topologiczny model elementarny uwzględnia:
1) elementarny zapis pojedynczych obiektów jako kompletne sekwencje współrzędnych naroży
2) budowanie obiektów wyłącznie z wektorów (pojedynczych odcinków)
3) zapis wyłącznie obiektów o kształcie elementarnym
4) budowanie obiektów wyłącznie z wektorów jednostkowych
16
Podstawową cechą łańcucha w modelu topologicznym jest to, że:
1) rozpoczyna się w węźle i kończy się w węźle
2) może przechodzić przez dowolną liczbę węzłów
3) może być rozpięty wyłącznie na dwóch węzłach i nie może mieć żadnych punktów pośrednich
4) musi rozpoczynać się i kończyć w tym samym węźle
17
Jedną z cech łańcucha w modelu topologicznym jest własność, że łańcuch posiada zapis:
1) obszaru po prawej stronie
2) numerów odcinków, które tworzą dany łańcuch
3) sekwencji obszarów po prawej stronie, które obiega
4) obszaru po lewej stronie i obszaru po prawej stronie
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 7
Systemy informacji o terenie
Egzamin dyplomowy inżynierski
18
Dane geometryczne łańcucha w modelu topologicznym zapisane są w postaci:
1) listy współrzędnych węzła początkowego, punktów pośrednich i węzła końcowego
2) tablicy z numerami wszystkich punktów łańcucha
3) listy współrzędnych punktów pośrednich łańcucha
4) tablicy dwuelementowej współrzędnych węzła początkowego i węzła końcowego
19
Definiowanie obszaru w modelu topologicznym ogólnym polega na:
1) zestawieniu współrzędnych punktów, na których rozpięty jest obszar
2) zestawieniu zbioru łańcuchów ograniczających ten obszar i tak skierowanych, żeby obszar znajdował
się po prawej stronie przy poruszaniu się wzdłuż granicy
3) zestawieniu wektorów normalnych do odcinków, z których zbudowany jest obszar
4) wypisaniu współrzędnych, na których rozpięte są wektory graniczne obszaru
20
Typową cechą modelu topologicznego jest:
1) ograniczona dokładność zapisu obiektów
2) zapotrzebowanie na dużą pojemność pamięci
3) możliwość wykonywania operacji na tak zapisanym obrazie mapy
4) łatwość ustalania relacji pomiędzy obiektami punktowymi
21
Model rastrowy oparty jest na:
1) rozkładzie obrazu na zbiór geometrycznych figur elementarnych
2) korzystaniu z płyty rastrowej do interpretacji obrazu mapy
3) rozkładzie obrazu na linie o rozciągłości pionowej
4) rozkładzie obrazu na linie o rozwinięciu poziomym
22
Zwiększenie dokładności odwzorowania obrazu w modelu rastrowym:
1) wiąże się z koniecznością zgrupowania pojedynczych pikseli w bloki (agregaty)
2 )wiąże się z koniecznością rozdziału obrazu na warstwy tematyczne
3) wymaga większego zapotrzebowania na pojemność pamięci i dłuższego czasu przesyłania obrazu
przez łącza telekomunikacyjne
4) wymaga zastosowania hierarchicznej metody zapisu obrazu
23
Serpentynowy sposób przebiegania pikseli:
1) eliminuje duże skoki, ale wprowadza asymetrię analizy obrazu w relacji do obszaru
zewnętrznego i środkowego
2) eliminuje skoki, ale jedynie we wnętrzu obrazu, pozostawiając duże skoki w pozycjach zwrotu
kierunku
3) zawiera analogię do przebiegania diagonalnego Cantora, lecz charakteryzuje się jednolitym
kierunkiem analizy obrazu
4) eliminuje skoki w analizie obrazu, ale wprowadza zakłócenie regularności kierunku przebiegania
kolejnych wierszy
24
Linia fraktalna Peana posiada następujące cechy:
1) posiada strukturę jednostopniową eliminującą duże skoki
2) umożliwia budowanie związków hierarchicznych oraz eliminuje częste skoki w analizie obrazu
3) nie dopuszcza żadnych skoków w analizie hierarchicznej obrazu
4) jest analogiczna jak przebieganie Hilberta z ta różnicą, że nie jest zachowana symetria względem linii
północ-południe
25
Tablica zbioru globalnego ma wymiary:
1) tyle kolumn ile występuje w obrazie klas obiektów (atrybutów) i tyle wierszy ile obraz zawiera pikseli
2) tyle kolumn ile występuje w obrazie obiektów i tyle wierszy ile wierszy zawiera podział rastrowy obrazu
3) tyle kolumn i tyle wierszy ile zawiera identyczny podział rastrowy obrazu
4) tyle kolumn ile pikseli zawiera obraz i tyle wierszy ile obraz zawiera obiektów
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 7
Systemy informacji o terenie
Egzamin dyplomowy inżynierski
26
Jedną z cech zbioru globalnego jest:
1) oszczędność zapisu
2) małe zapotrzebowanie na pojemność pamięci
3) uniwersalność i kompletność zapisu
4) wysoka dokładność kartometryczna zapisu obrazu
27
Jedną z wad zbioru globalnego jest:
1) zwięzłość zapisu obiektów o określonym atrybucie
2) niekompletność zapisu obrazu w miejscach nakładania się różnych klas obiektów
3) niejednoznaczność interpretacji atrybutów pikseli należących do różnych klas obiektów
4) konieczność selekcji tablicy w przypadku żądania wygenerowania konkretnych klas obiektów
28
Kolejność narastania kodu w schemacie drzewa czwórkowego:
1) pokrywa się z kierunkiem przebiegania zgodnym z linią fraktalną Hilberta
2) pokrywa się z kierunkiem przebiegania zgodnym z linią fraktalną Peana
3) pokrywa się z kierunkiem przebiegania zgodnym z analizą obrazu Cantora
4) pokrywa się z kierunkiem przebiegania realizującym kod Gray’a
29
W celu uzyskania oszczędnego zapisu obrazu w modelu rastrowym:
1) grupujemy obrazy elementarne zgodnie z wartościami atrybutów (klas obiektów) w jednolitym podziale
jednostopniowym
2) zamieniamy zbiory obrazów elementarnych na zblokowane linie poziome (wiersze)
3) budujemy obrazy strukturalne z bloków (agregatów) o zmiennych wymiarach, wypełniające zasięg
danych klas obiektów
4) zamieniamy zbiory obrazów elementarnych na zblokowane linie pionowe (kolumny)
30
Organizacja zbiorów warstw tematycznych w modelu rastrowym polega na tym, że:
1) strukturę zbiorów warstw tematycznych stanowią tablice
2) strukturę zbiorów warstw tematycznych stanowią pliki identyfikatorów pól
3) strukturę zbiorów warstw tematycznych stanowią listy pikseli ograniczających obiekty tematyczne
4) strukturę zbiorów warstw tematycznych stanowią listy identyfikatorów pól (agregatów), które mają te
same atrybuty
31
Zbiór globalny i zbiory warstw tematycznych mają następujące cechy:
1) zawierają dokładnie te same informacje, tylko informacje są zorganizowane w odmienny sposób
2) zawierają zupełnie różne informacje niezbędne dla użytkowników
3) zbiory warstw tematycznych zawierają niezbędne informacje dodatkowe
4) zbiory warstw tematycznych zawierają dodatkowe informacje zorganizowane identycznie jako zbiór
podstawowy
32
Jedną z zalet modelu rastrowego jest:
1) wysoka dokładność
2) małe zapotrzebowanie na pamięć komputera
3) zgodność układu siatki rastra z obiektami przestrzeni
4) łatwość ustalania związków przestrzennych pomiędzy obiektami, łatwość analiz i modyfikacji
33
W modelu rastrowym informacja zintegrowana jest:
1) z obiektami realnej przestrzeni przedstawianymi na mapie
2) z obszarami elementarnymi rastra (pikselami) lub z agregatami pikseli
3) z pikselami reprezentującymi linie lub wierzchołki obiektów
4) z konturami obiektów przestrzeni realnej przedstawianymi na mapie
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 7
Systemy informacji o terenie
Egzamin dyplomowy inżynierski
34
Graficzną interpretacją hierarchicznej bazy danych jest następująca struktura:
1) schemat sieciowy
2) tablica
3) lista strukturalna (lista list)
4) drzewo
35
Jedna z zalet hierarchicznej bazy danych jest:
1) powtarzalność zapisu na poszczególnych poziomach hierarchii
2) prosta struktura i mała liczba relacji w węzłach
3) łatwość zapisania w postaci tablicy
4) łatwość zapisania w postaci listy strukturalnej (listy list)
36
Sieciowa baza danych jest:
1) wyłącznie siecią, nie dopuszczającą jakiejkolwiek relacji hierarchii
2) rozszerzeniem bazy hierarchicznej, likwidującym powtórzenia
3) siecią, w której każdy kolejny węzeł jest połączony ze wszystkimi pozostałymi węzłami
4) siecią o ustalonej identycznej liczbie powiązań wychodzących z każdego węzła
37
Podstawową wadą hierarchicznej i sieciowej bazy danych jest to, że:
1) posiadają strukturę ustaloną w fazie projektu a modyfikacja tej struktury jest trudna
2) posiadają strukturę skomplikowaną i nieprzejrzystą
3) posiadają strukturę wymagającą znacznego przydziału pamięci komputera
4) posiadają strukturę trudną do implementacji komputerowej
38
Krotka (n-tka) w tablicy relacyjnej bazy danych jest:
1) listą rekordów
2) uporządkowanym ciągiem wartości atrybutów
3) zbiorem wszystkich wartości, które może przyjmować dany atrybut
4) zbiorem dziedzin atrybutów
39
Tablica relacji jest:
1) tablicą, w której wiersze są atrybutami zaś kolumny obiektami
2) tablicą, w której kolumny są rekordami
3) zbiorem informacji opisujących różnice pomiędzy obiektami
4) skończonym zbiorem krotek (n-tek)
40
W operacjach logicznych na tablicach relacji (suma, różnica, iloczyn tablic):
1) operandy muszą mieć taką samą liczbę rekordów (krotek)
2) operandy mogą mieć dowolne wymiary
3) operandy muszą mieć identyczny zestaw atrybutów
4) operandy muszą mieć identyczny zestaw atrybutów oraz identyczną liczbę rekordów (krotek)
41
Iloczyn relacji (w relacyjnej bazie danych):
1) daje w wyniku te krotki, które należą do jednej z relacji
2) daje w wyniku te krotki, które należą wyłącznie do jednej lub drugiej relacji
3) daje w wyniku te krotki, które należą jednocześnie do obydwu relacji
4) daje w wyniku te krotki, które nie występują ani w jednej ani w drugiej relacji
42
Różnica relacji (w relacyjnej bazie danych):
1) pozostawia te krotki w odjemnej, dla których nie istnieją krotki w odjemniku
(odjemnik jest wzorcem zabierania krotek)
2) polega na odrzuceniu krotek, których jakakolwiek wartość atrybutu jest równa zero
3) pozostawia te krotki w odjemnej, które jednocześnie występują w odjemniku
4) polega na odrzuceniu wszystkich krotek, które mają niekompletny zestaw atrybutów.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 7

Systemy informacji o terenie
Egzamin dyplomowy inżynierski
43
Projekcja w tablicy relacyjnej bazy danych jest:
1) projektowaniem zestawu atrybutów tablicy relacji
2) tworzeniem pionowego podzbioru przez wybór określonych atrybutów i usunięcie powtórzeń krotek
3) projektowaniem kompletnego zestawu rekordów
4) usuwaniem tych kolumn atrybutów, które mają niekompletne wartości
44
Selekcja w tablicy relacyjnej bazy danych jest:
1) tworzeniem poziomego zbioru relacji przez wybór krotek spełniających określony warunek
2) usuwaniem niekompletnych krotek (rekordów)
3) usuwaniem niekompletnych kolumn
4) tworzeniem dwóch tablic relacji poprzez podział krotek zgodnie z wartością czołowego atrybutu
45
Jedną z wad numerycznego modelu terenu opartego na siatce regularnej:
1) są trudne algorytmy wizualizacji takiego modelu
2) jest trudna implementacja komputerowa algorytmów
3) są skomplikowane algorytmy obliczeń
4) jest niemożliwe wierne odzwierciedlenie linii charakterystycznych terenu (linii szkieletowych)
46
Tworzenie numerycznego modelu terenu opartego na węzłach regularnej siatki kwadratów, z oddzielnym
wyznaczaniem wysokości każdego węzła polega na:
1) wyznaczeniu wysokości węzła na podstawie punktów źródłowych z najbliższego otoczenia, jako
średniej ważonej, przy czym wagi są proporcjonalne do wysokości punktów źródłowych
2) wyznaczeniu wysokości węzła na podstawie punktów źródłowych z najbliższego otoczenia, jako
średniej ważonej, przy czym wagi są równe odległościom pomiędzy węzłem a punktami źródłowymi
3) wyznaczeniu wysokości węzła na podstawie punktów źródłowych z najbliższego otoczenia, jako
średniej ważonej, przy czym wagi są odwrotnościami odległości pomiędzy węzłem a punktami
źródłowymi w potędze 1 – 4, w zależności od stopnia regularności terenu
4) wyznaczeniu wysokości węzła na podstawie punktów źródłowych z najbliższego otoczenia, jako
średniej ważonej, przy czym wagi są odwrotnościami odległości pomiędzy punktami źródłowymi i
czterema najbliższymi węzłami siatki
47
Jeżeli powierzchnia topograficzna terenu aproksymowana jest za pomocą wielomianu dwuliniowego,
rozpiętego na punktach nad węzłami siatki regularnej, to wysokość dowolnego punktu jest równa:
1) średniej ważonej z wysokości czterech najbliższych węzłów, przy czym wagi są równe polom
prostokątów leżących naprzeciwko węzłów
2) uśrednionej wysokości czterech najbliższych punktów węzłowych
3) średniej ważonej z wysokości czterech najbliższych węzłów, przy czym wagi są równe odległościom
punktu od tych węzłów
4) średniej ważonej z wysokości czterech najbliższych węzłów, przy czym wagi są proporcjonalne do
wysokości punktów węzłowych
48
Algorytm tworzenia siatki trójkątów numerycznego modelu terenu przy nieznanych połączeniach punktów
źródłowych (zwany algorytmem triangulacji):
1) powinien uwzględnić jedynie punkty skupione blisko, punkty dalekie powinny być odrzucone
2) powinien uwzględnić powiązanie każdego punktu ze wszystkimi pozostałymi
3) musi być uwzględniony każdy punkt zbioru, a procedura postępowania musi być jednoznaczna
4) powinien odrzucać punkty, które znajdują się w środku zbyt gęstych skupisk punktów
49
Podstawowym kryterium powiązania punktów, zgodnie z algorytmem triangulacji Delaunay’a jest:
1) pozostawienie wszystkich punktów wewnątrz okręgu o ustalonym promieniu, nieco większym niż
średnia odległość pomiędzy punktami
2) pozostawienie tych punktów, których symetralne powiązań z punktem centralnym utworzyły wielobok
Thiessena
3) odrzucenie wszystkich punktów leżących na zewnątrz wieloboku Thiessena
4) pozostawienie wszystkich punktów leżących pomiędzy okręgiem a wielobokiem Thiessena.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 7
Systemy informacji o terenie
Egzamin dyplomowy inżynierski
50
Wysokość interpolowanego punktu za pomocą płaszczyzny przechodzącej przez trzy najbliższe punkty,
przy wykorzystaniu numerycznego modelu opartego na nieregularnej siatce trójkątów, jest równa:
1) średniej ważonej z wysokości dwóch najbliższych punktów węzłowych, przy czym wagi są równe
odwrotnościom odległości od tych punktów
2) uśrednionej wysokości trzech najbliższych węzłów
3) średniej ważonej z wysokości trzech najbliższych punktów węzłowych, przy czym wagi są
proporcjonalne do wysokości tych punktów
4) średniej ważonej z wysokości trzech najbliższych punktów węzłowych, przy czym wagi są równe
polom trójkątów leżących naprzeciwko węzłów
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 7 z 7
Teledetekcja i fotogrametria
Egzamin dyplomowy inżynierski
1
W którym miejscu pionowego zdjęcia lotniczego rzut środkowy obiektu odpowiada rzutowi ortogonalnemu
?:
1) w każdym miejscu,
2) dotyczy to punktów znajdujących się na średniej wysokości,
3) w punkcie głównym zdjęcia,
4) na brzegach zdjęcia.
2
Wymień elementy orientacji zewnętrznej zdjęcia fotogrametrycznego:
1) współrzędne X,Y środka rzutów w terenowym układzie współrzędnych, azymut osi kamery, nachylenie
osi kamery oraz skręcenie zdjęcia ,
2) ck oraz współrzędne punktu głównego w układzie znaczków tłowych,
3) współrzędne X,Y,Z środka rzutów w układzie terenowym, oraz trzy kąty określające azymut osi kamery
nachylenie i skręcenie zdjęcia ,
4) współrzędne X,Y,Z środka rzutów w terenowym układzie współrzędnych oraz azymut osi kamery.
3
Zdjęcia ekwiwalentne to zdjęcia:
1) tych samych elementach orientacji wewnętrznej i dowolnych elementach orientacji zewnętrznej,
2) tych samych elementach orientacji wewnętrznej, o osiach kamer równoległych,
3) tych samych elementach orientacji zewnętrznej, różnych elementach orientacji wewnętrznej,
4) tych samych elementach orientacji wewnętrznej oraz współrzędnych środków rzutów, różnych
elementach orientacji kątowej.
4
Co to są elementy orientacji wewnętrznej zdjęcia?:
1) współrzędne obrazowego punktu głównego obiektywu w odniesieniu do płaszczyzny zdjęcia,
2) współrzędne znaczków tłowych z kalibracji kamery ,
3) Położenie punktu głównego zdjęcia w układzie znaczków tłowych i wymiar ramki tłowej,
4) współrzędne przedmiotowego punktu głównego obiektywu w układzie tłowym zdjęcia.
5
Elementy orientacji zewnętrznej zdjęcia umożliwiają:
1) rekonstrukcję wiązki promieni rzutujących w kamerze,
2) wykonanie orientacji na znaczki tłowe,
3) odtworzenie położenia wiązki promieni rzutujących w układzie terenowym,
4) obliczenie trzech kątów (omega, fi, kappa) określających orientację wiązki.
6
Elementy orientacji wewnętrznej zdjęcia mają na celu:
1) wykonanie orientacji wewnętrznej na autografie,
2) odtworzenie wiązki promieni rzutujących w kamerze,
3) odtworzenie wiązki promieni rzutujących w terenowym układzie odniesienia,
4) wykonanie orientacji wzajemnej na autografie.
7
Stała kamery to odległość od:
1) środka rzutów do punktu przecięcia się łącznic znaczków tlowych,
2) środka rzutów do punktu głównego zdjęcia,
3) punktu głównego zdjęcia do punktu przecięcia się łącznic znaczków,
4) średnia odległość między znaczkami tłowymi kamery.
8
Zdjęcia do obserwacji stereoskopowej powinny spełniać następujące warunki:
1) osie w przybliżeniu prostopadłe do siebie i nierównoległe do bazy fotografowania,
2) osie o dowolnej orientacji, zdjęcia wykonane z dwóch różnych stanowisk,
3) zdjęcia wykonane z tego samego stanowiska lecz o różnej orientacji kątowej,
4) osie w przybliżeniu do siebie równoległe i prostopadłe do bazy fotografowania.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 1 z 7
Teledetekcja i fotogrametria
Egzamin dyplomowy inżynierski
9
Na pionowym zdjęciu płaskiego terenu w skali 1:5000 wykonanym kamera o ck=300mm znajdują się dwa
budynki: pierwszy o wysokości 10m, drugi o wysokości 20m .Ich krawędzie widoczne na zdjęciu są tej
samej długości. Budynek drugi znajduje się w odległości od punktu głównego:
1) cztery razy mniejszej od pierwszego,
2) dwa razy większej od pierwszego,
3) cztery razy większej od pierwszego,
4) dwa razy mniejszej od pierwszego.
10
Które z elementów orientacji zewnętrznej zdjęcia lotniczego prawie pionowego nie można uznać za w
przybliżeniu równe zero ?
1) kąt obrotu ω,
2) kąt obrotu φ,
3) kąt obrotu κ,
4) współrzędne środka rzutu.
11
Funkcja DLT określa zależność pomiędzy:
1) współrzędnymi punktów na zdjęciu a ich współrzędnymi w przestrzennym układzie terenowym,
2) współrzędnymi punktów na zdjęciu a ich współrzędnymi w przestrzennym układzie tłowym,
3) współrzędnymi przestrzennymi punktów na zdjęciu, a ich współrzędnymi płaskimi w przestrzeni
przedmiotowej,
4) współrzędnymi punktów na zdjęciu a ich współrzędnymi w płaszczyźnie obiektu.
12
Odpowiadające sobie (homologiczne) punkty na dwu zdjęciach stereogramu charakteryzuje:
1) położenie na odpowiadających sobie liniach rdzennych (epipolarnych),
2) ta sama współrzędna tłowa y(z),
3) ten sam promień radialny,
4) stała paralaksa podłużna.
13
Dla wykonania przetwarzania rzutowego płaszczyzny zdjęcia na płaszczyznę mapy potrzebna jest
znajomość położenia na obu płaszczyznach minimum:
1) dwóch odpowiadających sobie punktów położonych jak najdalej od siebie,
2) trzech odpowiadających sobie punktów nie leżących na jednej prostej,
3) czterech odpowiadających sobie punktów, z których żadne trzy nie należą do jednej prostej,
4) pięciu dowolnie rozmieszczonych punktów homologicznych.
14
Fotogram pomiarowy wykonany kamerą fotogrametryczną jest wiernym rzutem:
1) ortogonalnym,
2) ukośnym,
3) środkowym,
4) prostokątnym.
15
Przez kalibrację kamery rozumiemy:
1) rektyfikację libell oraz justowanie innych systemów optyczno-mechanicznych kamery,
2) określenie elementów orientacji wewnętrznej kamery,
3) kontrolę działania wszystkich systemów kamery,
4) wymianę stożka kamery lotniczej.
16
Poprawki ze względu na błąd dystorsji obiektywu wprowadza się na kierunku:
1) z punktu izocentrycznego,
2) z punktu nadirowego,
3) z punktu głównego,
4) z punktu przyśrodkowego.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 2 z 7
Teledetekcja i fotogrametria
Egzamin dyplomowy inżynierski
17
Parę zdjęć naziemnych o osiach równoległych i poziomych nazywamy stereogramem:
1) zwróconym,
2) normalnym,
3) zbieżnym,
4) równoległym.
18
Punktem głównym zdjęcia nazywamy:
1) przecięcie łącznic znaczków tłowych,
2) rzut ortogonalny środka rzutów na płaszczyznę tłową,
3) punkt powstały z przebicia zdjęcia prosta pionową przechodzącą przez środek rzutów,
4) punkt, przez który przechodzą wszystkie promienie wiązki rzutującej.
19
Największe „martwe pola” występują na zdjęciach lotniczych wykonanych kamerą ze stożkiem:
1) szerokokątnym,
2) nadszerokokątnym,
3) normalnokątnym,
4) nie ma znaczenia.
20
System FMC w kamerze lotniczej ma za zadanie:
1) pionowanie osi kamery,
2) tłumienie drgań kamery,
3) kompensacje rozmazania spowodowanego ruchem samolotu,
4) kompensację nieostrości spowodowanej winietowaniem.
21
Który z niżej wymienionych warunków nie dotyczy wszystkich kamer fotogrametrycznych?:
1) rejestracja obrazu na powierzchni zbliżonej do płaszczyzny,
2) zminimalizowana dystorsja obiektywu,
3) znane i stabilne elementy orientacji wewnętrznej,
4) kompensację rozmazania FMC.
22
Która z wymienionych niżej cech kamer fotogrametrycznych lotniczych i naziemnych dotyczy jednocześnie
obu typów kamer:
1) możliwość realizacji założonych kątowych elementów orientacji zewnętrznej zdjęć,
2) znajomość elementów orientacji wewnętrznej wykonywanych zdjęć,
3) niezmienna odległość obrazowa (stała kamery) ,
4) materiał fotograficzny na płytach szklanych.
23
Od czego zależy wybór kąta rozwarcia stożka przy projekcie lotu fotogrametrycznego?:
1) od skali opracowywanej mapy,
2) od rodzaju pokrycia terenu i jego deniwelacji,
3) od skali zdjęć,
4) od wielkości terenu objętego projektem lotu.
24
Zdjęcia lotnicze wykonane będą równocześnie z tego samego samolotu kamerami: szerokokątną (Ck=150
mm) i normalnokątną (Ck=300 mm). Którą kamerą zarejestrowana zostanie większa powierzchnia terenu, i
ile razy większa:
1) kamerą szerokokątną zostanie zarejestrowany obszar 4 razy większy,
2) kamerą szerokokątną zarejestrowany zostanie obszar 2 razy większy,
3) obiema kamerami zarejestrowany zostanie obszar o tej samej powierzchni,
4) kamerą normalnokątną zarejestrowany zostanie obszar 2 razy większy niż kamerą szerokokątną.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 3 z 7
Teledetekcja i fotogrametria
Egzamin dyplomowy inżynierski
25
Dlaczego do wielu opracowań fotogrametrycznych wykorzystuje się zdjęcia normalne?:
1) bo takie zdjęcia pozwalają na pomiar stereoskopowy,
2) bo zapewniają optymalną dokładność opracowania fotogrametrycznego,
3) ponieważ do takich zdjęć są przystosowane kamery,
4) bo takie zdjęcia zapewniają pokrycie 60%.
26
Jaka jest zależność miedzy przewidywanym błędem sytuacyjnym, a przewidywanym błędem wysokości
wyznaczenia położenia punktu ze stereogramu zdjęć lotniczych ?:
1) błąd wysokości jest dwa razy większy od błędu sytuacyjnego,
2) aby otrzymać błąd wysokości, należy błąd sytuacyjny pomnożyć przez stosunek bazowy w/B=Ck/b,
3) błąd wysokości jest dwa razy mniejszy od błędu sytuacyjnego,
4) błąd wysokości jest w/Ck razy większy od błędu sytuacyjnego.
27
Pierścień głębi ostrości w aparacie fotograficznym zawiera:
1) zakres odległości fotografowania,
2) dwa symetryczne ciągi przysłon ,
3) ciąg otworów względnych,
4) zakres odległości, dla którego obiekt fotografowany będzie ostry .
28
Zdjęcia niemetryczne to zdjęcia wykonane:
1) cyfrową kamerą fotogrametryczną,
2) fotograficznym aparatem analogowym ze znajomością dystorsji obiektywu,
3) aparatem cyfrowym ze znajomością dystorsji obiektywu i stałej kamery,
4) dowolnym aparatem fotograficznym .
29
Co to jest stosunek bazowy?:
1) iloraz bazy podłużnej i odstępu między osiami szeregów,
2) iloraz wysokości bezwzględnej lotu i odstępu między dwoma sąsiednimi środkami rzutów w szeregu,
3) iloraz odstępu między dwoma sąsiednimi środkami rzutów w terenie a ogniskową obiektywu kamery,
4) iloraz ogniskowej obiektywu kamery i odległości między środkami rzutów dwu sąsiednich zdjęć w
szeregu na zdjęciach.
30
Jaką wielkość ma baza podłużna stereogramu zdjęć lotniczych dla p= 60%, formatu 23*23cm i skali zdjęć
1:5000 ?:
1) 460 m,
2) 690 m,
3) 92 mm,
4) 138 mm.
31
Jaka będzie odległość między osiami szeregów przy pokryciu poprzecznym między szeregami q = 30%,
formacie zdjęć 23*23 cm i skali 1:10 000?
1) 690 m,
2) 161 mm,
3) 1610 m,
4) 6900 m.
32
Rejony Grubera to:
1) rejony na zdjęciu, gdzie występują najmniejsze zniekształcenia radialne,
2) rejony zdjęć, gdzie należy wybierać punkty homologiczne do orientacji wzajemnej,
3) rejony na stereogramie, gdzie należy wybierać fotopunkty do orientacji bezwzględnej,
4) rejony w terenie, gdzie należy sygnalizować fotopunkty do aerotriangulacji.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 4 z 7
Teledetekcja i fotogrametria
Egzamin dyplomowy inżynierski
33
Orientacja wewnętrzna na autografie cyfrowym polega na:
1) transformacji układu pikselowego zdjęć do układu tłowego,
2) wyznaczeniu elementów orientacji wewnętrznej zdjęć,
3) prowadzeniu zdjęć stereogramu do wspólnego układu ,
4) uzyskaniu efektu stereoskopowego .
34
Orientacja wzajemna pary zdjęć polega na:
1) doprowadzeniu do równoległości łącznic znaczków tłowych obu zdjęć,
2) usunięciu paralaksy podłużnej na modelu (doprowadzeniu do przecięcia promieni jednoimiennych obu
zdjęć),
3) usunięciu paralaksy poprzecznej na modelu (doprowadzenie do przecięcia promieni jednoimiennych obu
zdjęć),
4) doprowadzeniu zdjęć, względem terenowego układu odniesienia, do położenia, jak w momencie
fotografowania.
35
Orientacja bezwzględna modelu na autografie cyfrowym polega na:
1) obliczeniu współczynników transformacji przestrzennej pomiędzy lokalnym układem modelu, a układem
terenowym,
2) obliczeniu współrzędnych lewego środka rzutów, współczynnika skali oraz trzech kątów orientacji
każdego zdjęcia ,
3) obliczeniu elementów orientacji zewnętrznej i wewnętrznej obu zdjęć,
4) zeskalowaniu modelu i spoziomowaniu zdjęć.
36
Aby wykonać orientacje bezwzględną modelu na autografie cyfrowym należy znać:
1) długość odcinka na modelu i odpowiadającą mu długość w terenie,
2) współrzędne. Środków rzutów lewego i prawego zdjęcia,
3) współrzędne XYZ co najmniej trzech fotopunktów,
4) wysokości co najmniej trzech fotopunktów.
37
W celu obliczenia parametrów orientacji wzajemnej pary zdjęć (bez wyrównania) należy pomierzyć na
stereogramie:
1) co najmniej 6 fotopunktów w rejonach Grubera ,
2) co najmniej 5 dowolnych punktów w rejonach Grubera,
3) co najmniej 12 dowolnych punktów na stereogramie ,
4) co najmniej 5 fotopunktów rozmieszczonych w rejonach Grubera.
38
Co to jest ortofotogram?
1) pionowe zdjęcie terenu,
2) przetworzone zdjęcie w taki sposób, ze wszystkie jego punkty są w jednolitej skali,
3) przetworzone zdjęcie w taki sposób, ze zachowuje jednolita skale dla punktów znajdujących się na
powierzchni terenu,
4) zdjęcie o dowolnej orientacji zamienione na ściśle pionowe.
39
Jakie dane pozwalają na utworzenie ortofotografii?
1) współrzędne środka rzutów zdjęcia i jego skala,
2) elementy orientacji wzajemnej stereogramu i orientacja bezwzględna jednego ze zdjęć,
3) utworzenie modelu stereoskopowego,
4) elementy orientacji zdjęcia, zdjęcie i NMT.
40
Ortofotomapa różni się od fotomapy tym, że:
1) do wykonania ortofotomapy nie jest potrzebny numeryczny model terenu,
2) ortofotomapa posiada dużo większe błędy dla terenów pagórkowatych,
3) przy wykonywaniu ortofotomapy musimy znać orientację wewnętrzną zdjęć,
4) fotomapa w przeciwieństwie do ortofotomapy przedstawia obraz terenu w rzucie ortogonalnym.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 5 z 7
Teledetekcja i fotogrametria
Egzamin dyplomowy inżynierski
41
Celem nowoczesnej aerotriangulacji jest:
1) zagęszczenie osnowy fotogrametrycznej dla orientacji wzajemnej modeli,
2) opracowanie mapy,
3) dostarczenie danych dla utworzenia ortofotomapy i zagęszczenie osnowy fotogrametrycznej do
orientacji modeli,
4) otrzymanie numerycznego modelu terenu.
42
Histogram obrazu cyfrowego wyraża:
1) przyporządkowanie jasności pikseli ich odpowiedziom spektralnym,
2) zależność gęstości optycznej od naświetlenia,
3) przyporządkowanie ilości pikseli ich jasności,
4) zależność jasności pikseli od ich położenia.
43
Streching czyli rozciągniecie histogramu powoduje:
1) zwiększenie kontrastu obrazu,
2) przyciemnienie obrazu,
3) inwersję barw,
4) rozjaśnienie obrazu.
44
Które z poniższych systemów rejestracji promieniowania zalicza się do grupy systemów aktywnych?:
1) Ikonos,
2) Spot,
3) Landsat,
4) Radarsat.
45
Obliczając iloraz kanału podczerwonego i czerwonego otrzymujemy wskaźnik pozwalający wyznaczyć:
1) zanieczyszczenie atmosfery,
2) zawartość chlorofilu,
3) ilość biomasy,
4) temperaturę .
46
Wzorce statystyczne klas zawierają dane takie jak:
1) minimum i maksimum jasności pikseli oraz ich liczbę w danej klasie,
2) prawdopodobieństwo przyporządkowania piksela danej klasie,
3) odległości piksela od środka klas,
4) całkowitą liczbę pikseli w danej klasie, średnią jasność pikseli i odchylenie standardowe.
47
Pole treningowe w klasyfikacji nadzorowanej to:
1) zbiór pikseli na obrazie wielospektralnym reprezentatywnych dla danej klasy użytkowania terenu,
2) zbiór pikseli o podobnej jasności na obrazie wielospektralnym,
3) zbiór pikseli o tej samej odpowiedzi spektralnej na obrazie wielospektralnym ,
4) wybrany na kompozycji barwnej obszar o wyraźnych granicach.
48
W metodzie klasyfikacji MAXLIKE kryterium przyporządkowania piksela do klasy to:
1) podobieństwo jasności piksela do średniej jasności w klasie,
2) maksimum prawdopodobieństwa przynależności piksela do klasy,
3) maksimum prawdopodobieństwa wystąpienia klasy na obrazie,
4) podobieństwo średniej jasności piksela w kanałach do średniej jasności wzorca klasy w kanałach.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 6 z 7

Teledetekcja i fotogrametria
Egzamin dyplomowy inżynierski
49
Krzywa spektralna przedstawia:
1) jak zmienia się odbicie promieniowania elektromagnetycznego w zależności od długości padającej fali,
2) jak zmienia się długość fali w zależności od współczynnika odbicia promieniowania
elektromagnetycznego,
3) jak zmienia się odbicie promieniowania elektromagnetycznego w zależności od temperatury,
4) zależność odbicia promieniowania elektromagnetycznego przez określone obiekty w różnych porach
dnia.
50
Obraz wielospektralny w teledetekcji to:
1) każdy obraz barwny,
2) obraz który składa się z kilku kanałów spektralnych zarejestrowanych w tym samym czasie,
3) obraz który składa się z kilku kanałów spektralnych zarejestrowanych w różnym czasie ,
4) obraz który składa się z czterech obrazów, wykonanych zimą, wiosnę, latem i jesienią.
PWSTE Jarosław, IIT, Kierunek: Geodezja i Kartografia
Strona 7 z 7
Document Outline
Wyszukiwarka
Podobne podstrony:
pytania egz inz oprog
egzamin inżynierski, pytanie egz inz plus
Opracowane pytania technika strzelnicza egz inz, egzamin inzynierski gig
pytania na egz Inż opr1, inżynieria oprogramowania
Opracowane pytania technika strzelnicza egz inz
pytania na egz Inż opr, IIS PWSZ, inżynieria oprogramowania, io
pytania z egz inz na egz z ej
pytania na egz Inż opr, inżynieria oprogramowania
inzynieryjna egz.inz gospodarka, geodezja testy różne
owce - egz inz
Gleboznawstwo.GiK.Pytania.Wykłady 2013 MOJE, geodezja i kartografia PW
MAKROEKONOMIA PYTANIA ALL sciaga(1), MATERIAŁY DO NAUKI
pytania all
pytania egz, BADANIA OPERACYJNE1-pytania, BADANIA OPERACYJNE
egz inz, test
więcej podobnych podstron